

Improved graph optimization SLAM method
A graph optimization and algorithm technology, applied in the fields of robotics, navigation and positioning, which can solve problems such as heavy workload, high system requirements, and difficult maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The present invention will adopt the following realization process in order to realize the function of above-mentioned algorithm.
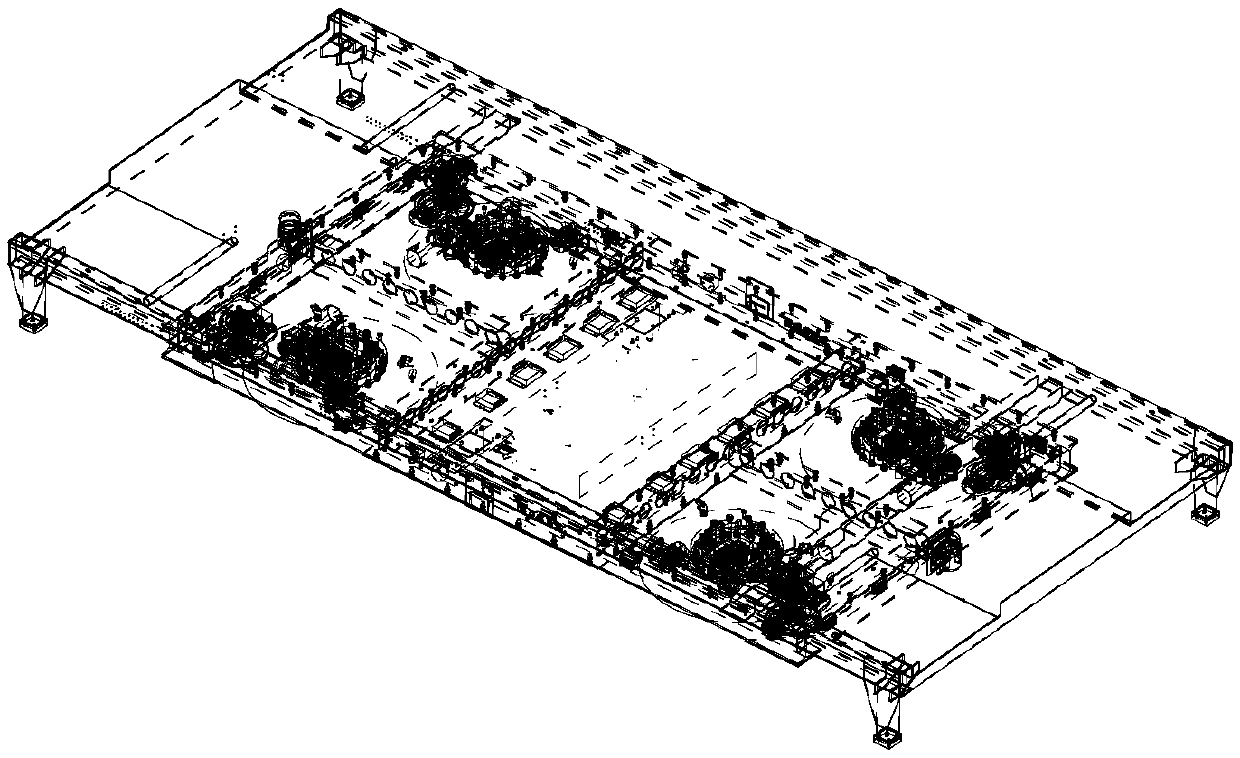
[0087] In order to realize the above algorithm, our solution needs to use the following equipment: four-wheel independent drive omnidirectional drive AGV, one PC (need to install Linux system, 4G memory, i7 processor, quad core, hard disk size is 500G), SICK151 lidar (resolution 0.5°, scanning frequency 50Hz), remote control handle or keyboard, several reflectors, odometer. The whole experimental platform is shown in Fig. figure 1 .
[0088] Four-wheel independent drive omnidirectional AGV includes: frame, four travel motors, four steering motors, four lift motors, four travel drives, four rotation drives, four lift drives, power lithium batteries, battery chargers, Reducer, proximity switch, emergency switch, gyroscope, lidar, ultrasonic sensor.
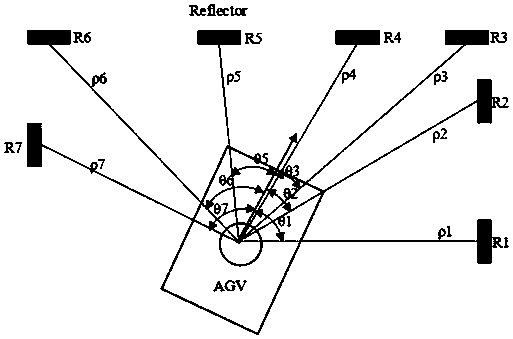
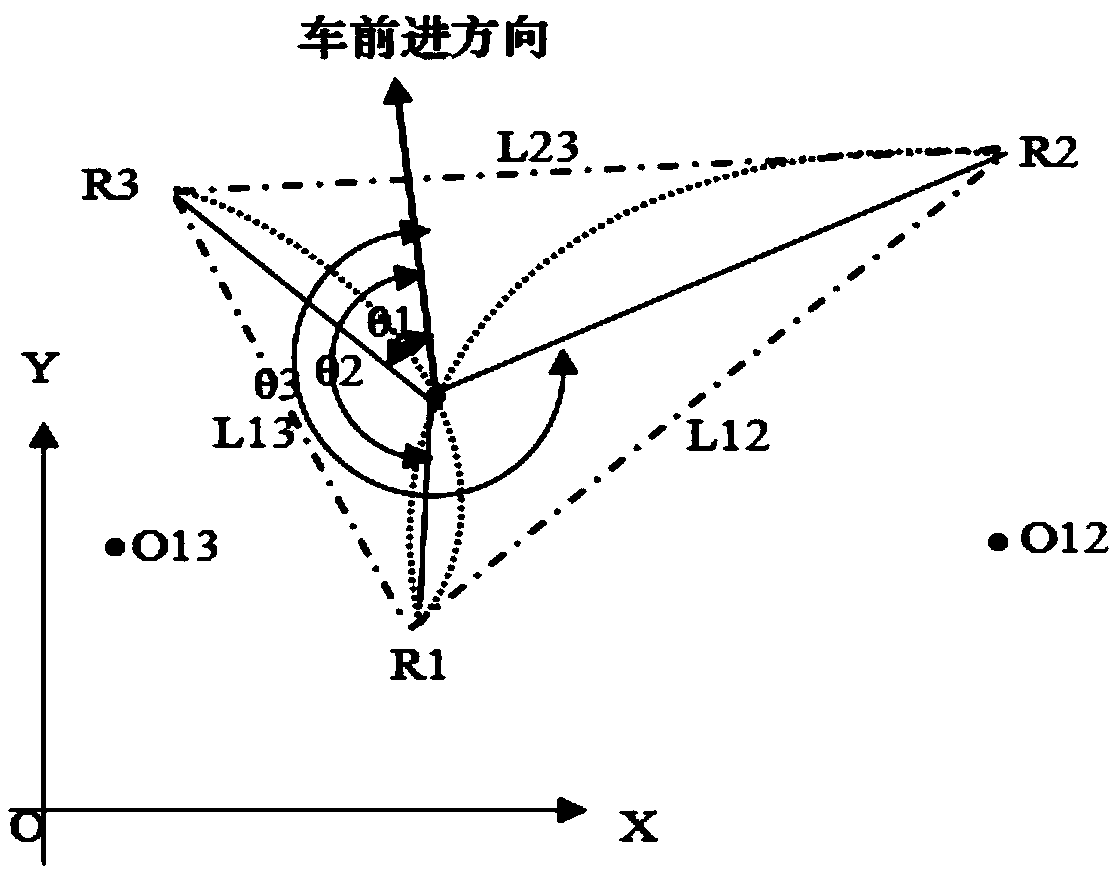
[0089] Triangulation Algorithm
[0090] A certain number of reflectors or reflector colum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More