

Binocular vision based object location grabbing method for mechanical arm
A binocular vision, target positioning technology, applied in image data processing, instruments, calculations, etc., can solve the problems of control system and servo operation not working normally, grasping and other problems, to meet time requirements, less calculation, simple method Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with accompanying drawing.
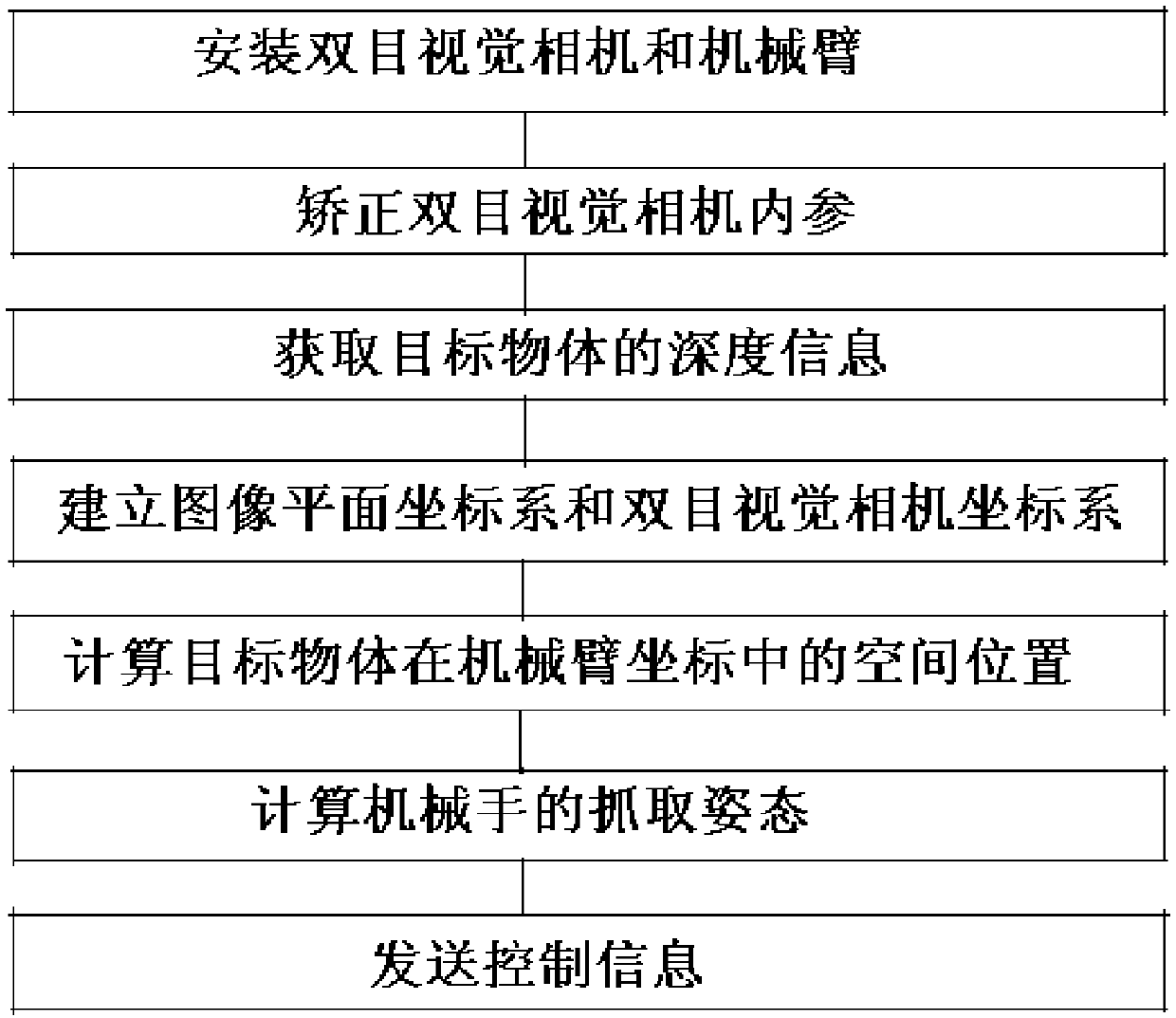
[0052] Such as figure 1 As shown, a binocular vision-based robotic arm target positioning and grasping method includes the following steps:
[0053] Step 1. Install the binocular vision camera and the robotic arm, where the binocular vision camera is placed horizontally, and ensure that the binocular vision camera and the base of the robotic arm are on the same level, and shoot objects horizontally. The recognition area is within the working radius of the robotic arm. Requirements The distance between the position of the binocular vision camera and the recognition area is 0.8-20.0 meters and ensure that the recognition area is not blocked;
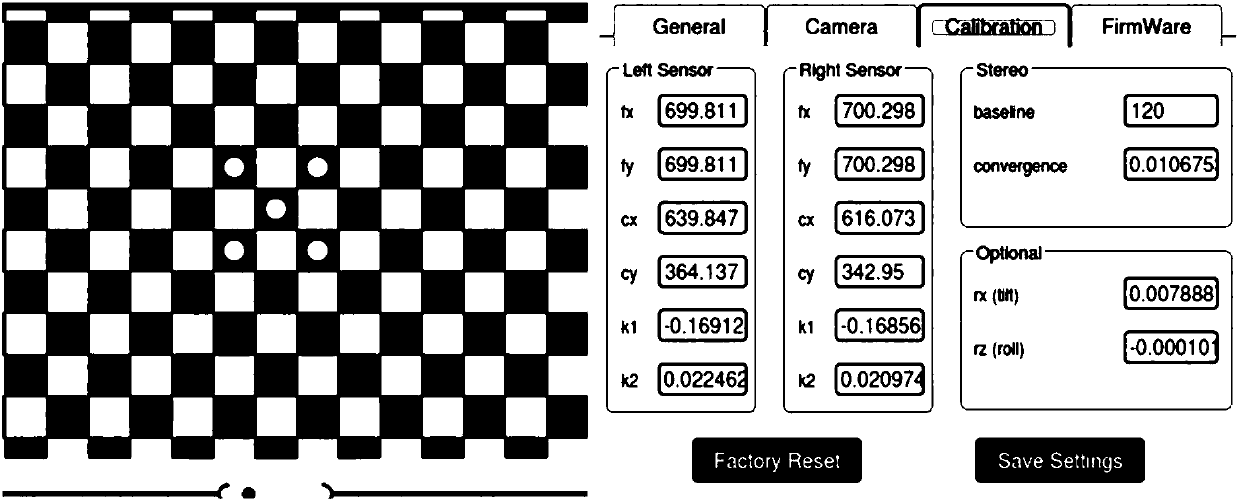
[0054] Step 2. Correct the internal parameters of the binocular vision camera. The internal parameters of the binocular vision camera are parameters related to the characteristics of the binocular vision camera itself. This can determi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More