

Multi-intelligent-agent system collaborative fault-tolerant control method based on finite time control
A multi-agent system, limited time technology, applied in the field of multi-agent systems, can solve problems such as the inability to obtain convergence performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
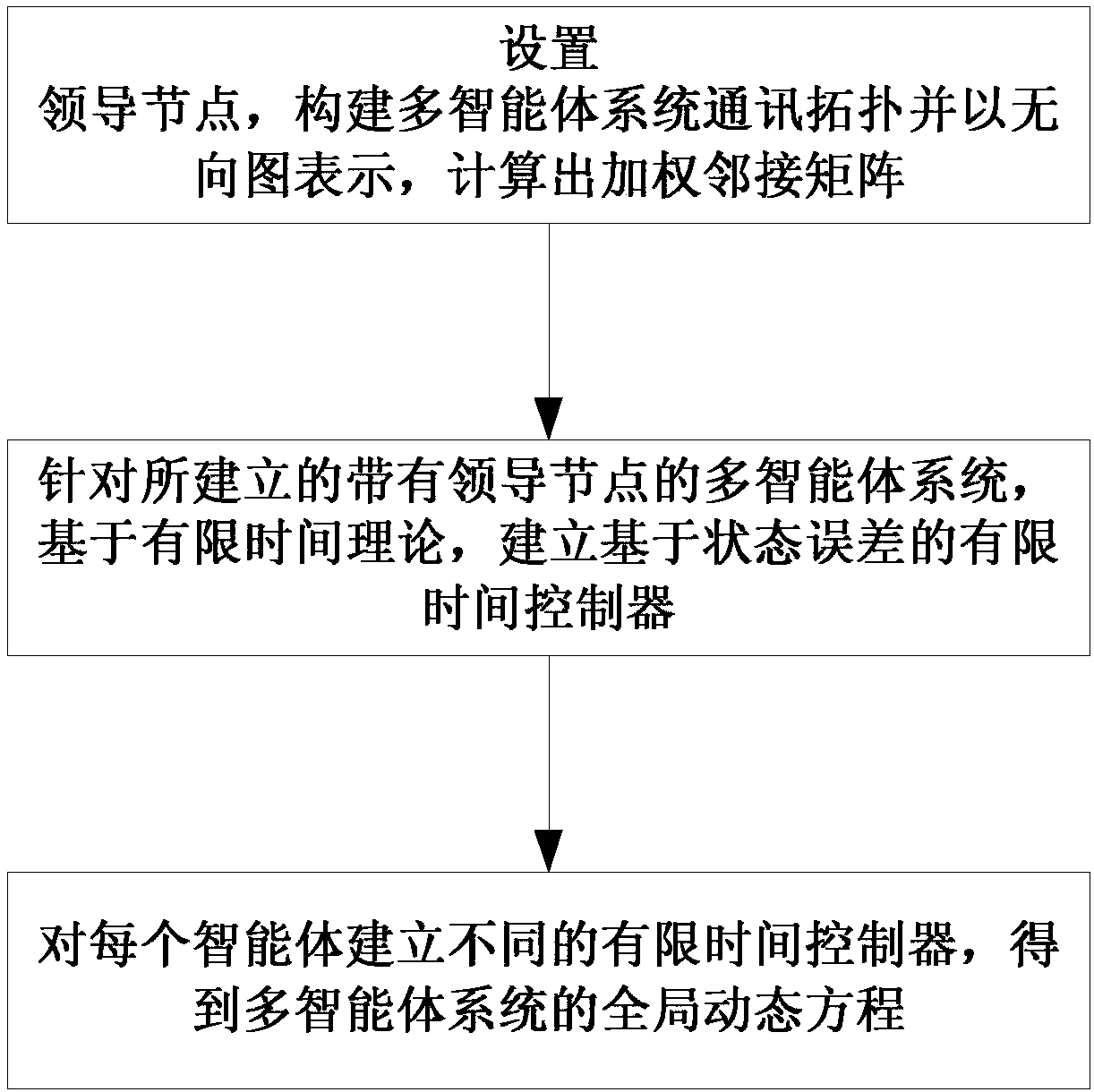
[0047] A cooperative fault-tolerant control method for multi-agent systems based on finite-time control, such as figure 1 As shown, the steps are as follows.
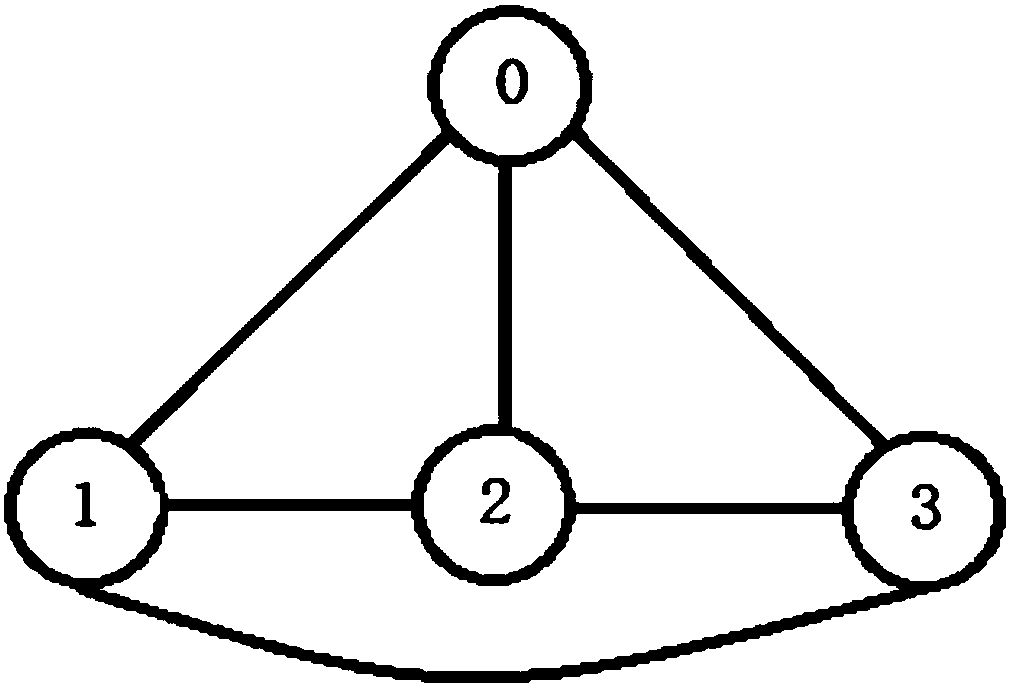
[0048] Step 1: Select an agent among all agents as the leader node, construct the communication topology of the multi-agent system through the communication link between the agents and express it in an undirected graph, and calculate the weighted adjacency matrix L+G, where G is the adjacency matrix of the leader node, and L is the Laplacian matrix.
[0049] The related theory of graph theory is used to describe the communication topology of the multi-agent system. Use T=(υ,ξ,E) to represent the communication topology of the multi-agent system; where, υ={υ 0 ,υ 1 ,…,υ N} represents all agents, υ 0 represents the leader node, υ i Represents the following nodes, i=1,2,…,N; ξ rep...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More