

Unmanned aerial vehicle autonomous flight control method and system based on deep learning
A flight control system and deep learning technology, applied in the field of autonomous flight control of drones, can solve problems such as poor flexibility, low autonomy, and slow speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and through specific implementation examples. The following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention.
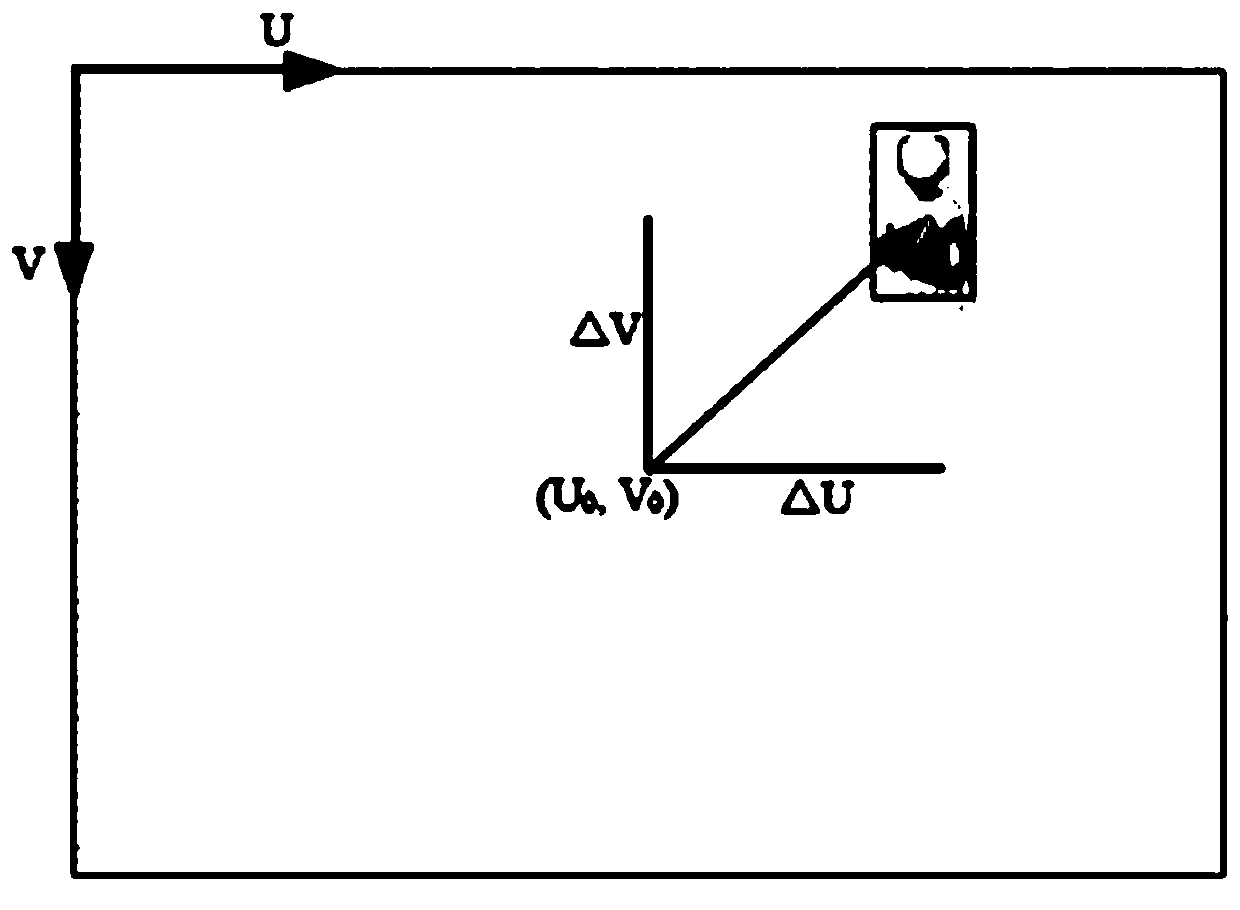
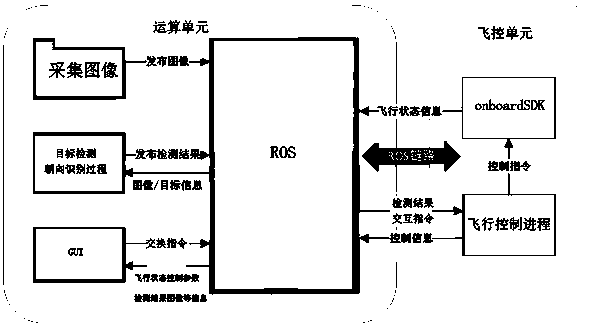
[0035] The key of the present invention is to build a system loop, where the data acquisition unit collects images, the deep learning operation unit performs calculations, and finally feeds back to the flight control unit for control. figure 1 : Schematic diagram of the position of the target in the image in the present invention. figure 2 : Actual system structure and functional block diagram in the present invention.
[0036] The content of the present invention is mainly divided into three parts: target detection and orientation estimation neural network design, flight control algorithm design and distributed system realization.
[0037] 1. Target detection and orientation estimation
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More