

Full coverage motion path planning method for agricultural machinery
A motion path, agricultural machinery technology, applied in directions such as navigation and calculation tools, can solve problems such as high repetition rate and coverage rate that does not meet the requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to clearly illustrate the technical features of the solution of the present invention, the present invention will be described in detail below through specific implementation modes and in conjunction with the accompanying drawings.
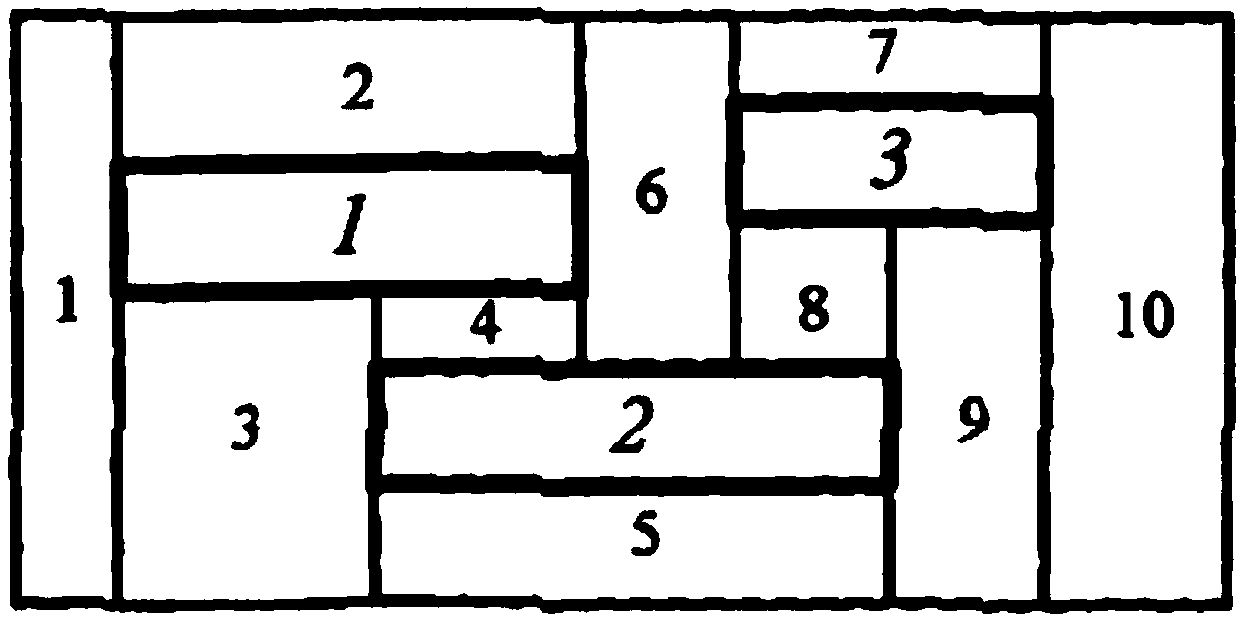
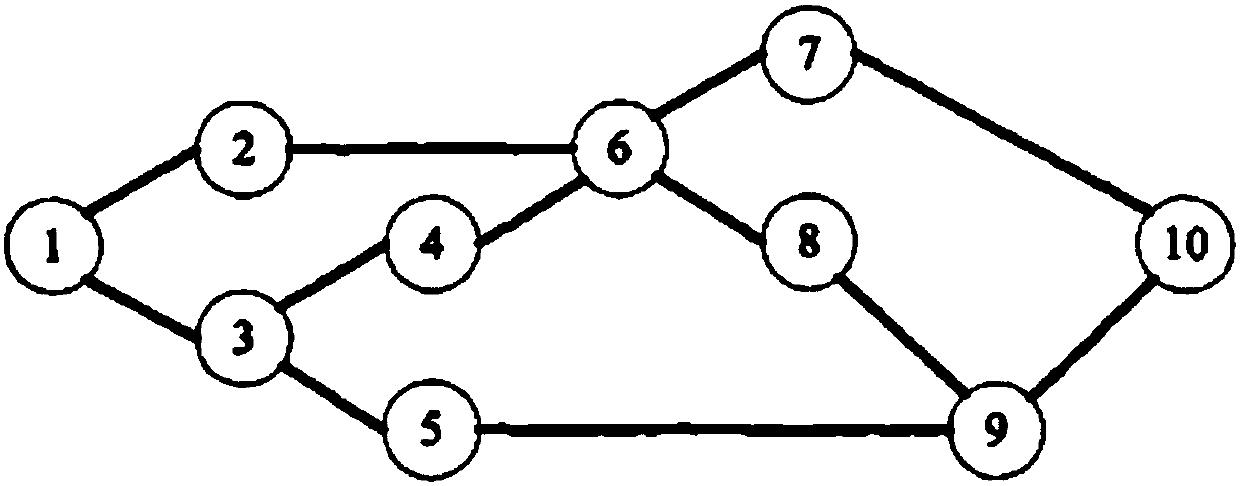
[0014] Step 1: Use the Boustrophedon cell decomposition algorithm to decompose the farmland map into small modules.
[0015] The Boustrophedon cell decomposition algorithm is an accurate cell decomposition method. The cell based on this decomposition idea has the following characteristics: the cell must have two sides that are parallel, and the other two sides are the boundary of obstacles or the boundary of the environment. The principle is as follows: sweep the target area with a straight line, and when the connectivity encountered by the straight line changes, a new unit is generated.
[0016] combine figure 1 , before describing the Boustrophedon unit decomposition algorithm, make the following instructions: establish a two-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More