Mechanical arm positioning method and positioning mechanical arm
A positioning method and robotic arm technology, applied in image data processing, instruments, calculations, etc., can solve complex problems, achieve the effects of reducing complexity, ensuring real-time performance and accuracy, and improving environmental perception and intelligent decision-making capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
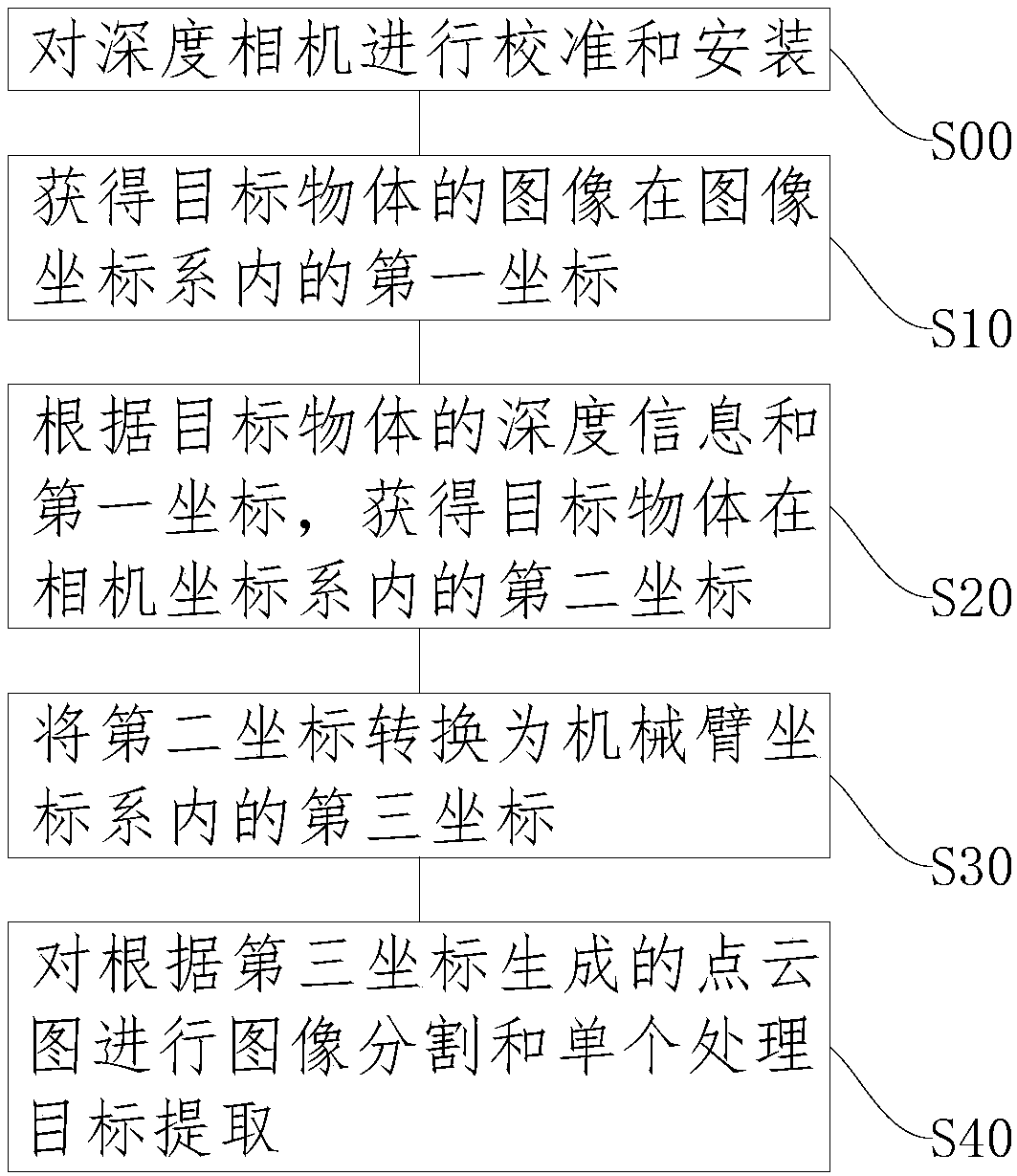
[0039] see figure 1 and image 3, this embodiment provides a positioning method for a mechanical arm, which can meet the real-time requirements, has a certain ability to resist interference from ambient background light, and does not require an external mechanical scanning structure. The positioning method of the robotic arm provided in this embodiment can reduce the complexity of positioning the robotic arm, and improve the environment perception capability and intelligent decision-making capability of the robotic arm.
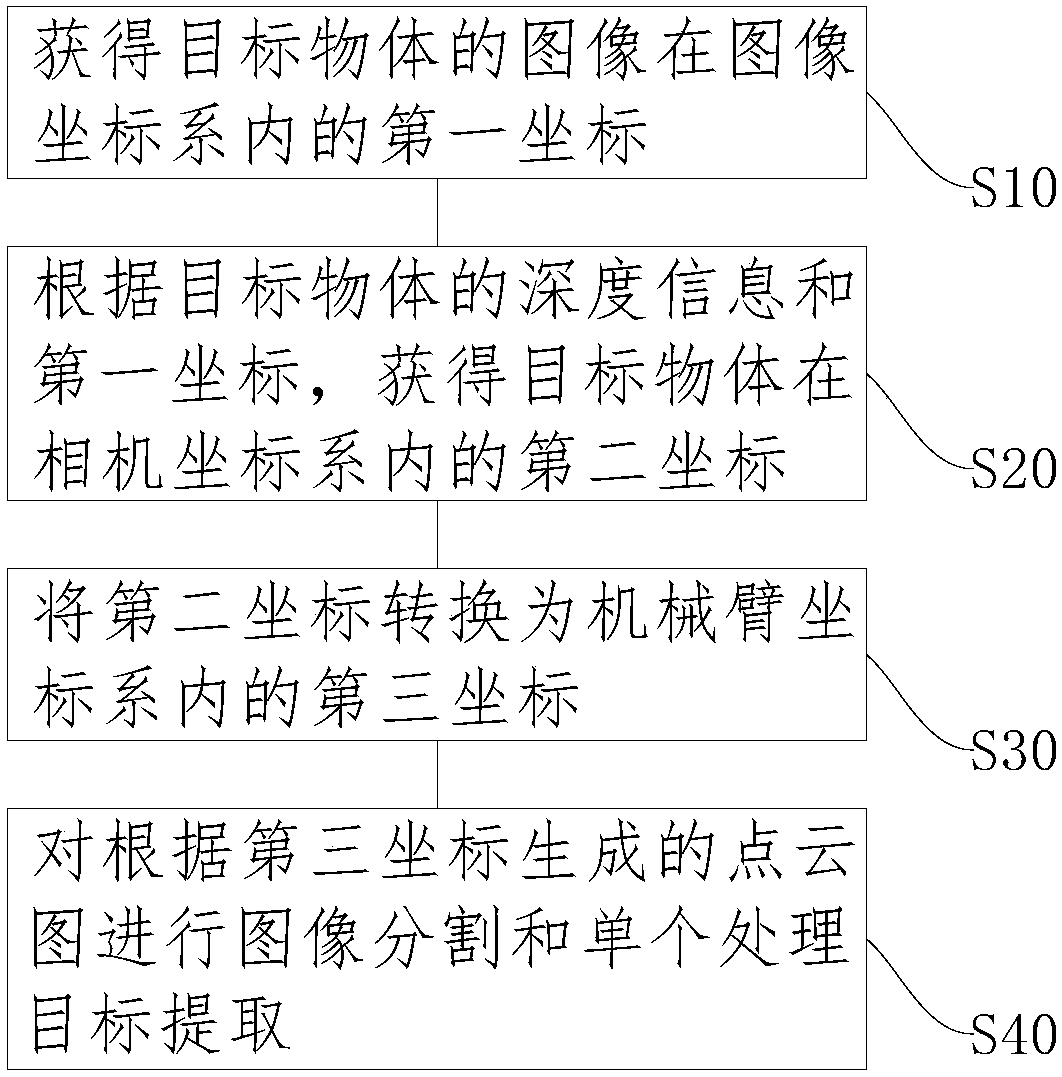
[0040] The robot positioning method provided in this embodiment includes: obtaining the first coordinates of the image of the target object 300 in the image coordinate system. According to the depth information of the target object 300 and the first coordinates, the second coordinates of the target object 300 in the camera coordinate system are obtained. Convert the second coordinate to the third coordinate in the robot coordinate system.
[0041] Wherein,...
no. 2 example
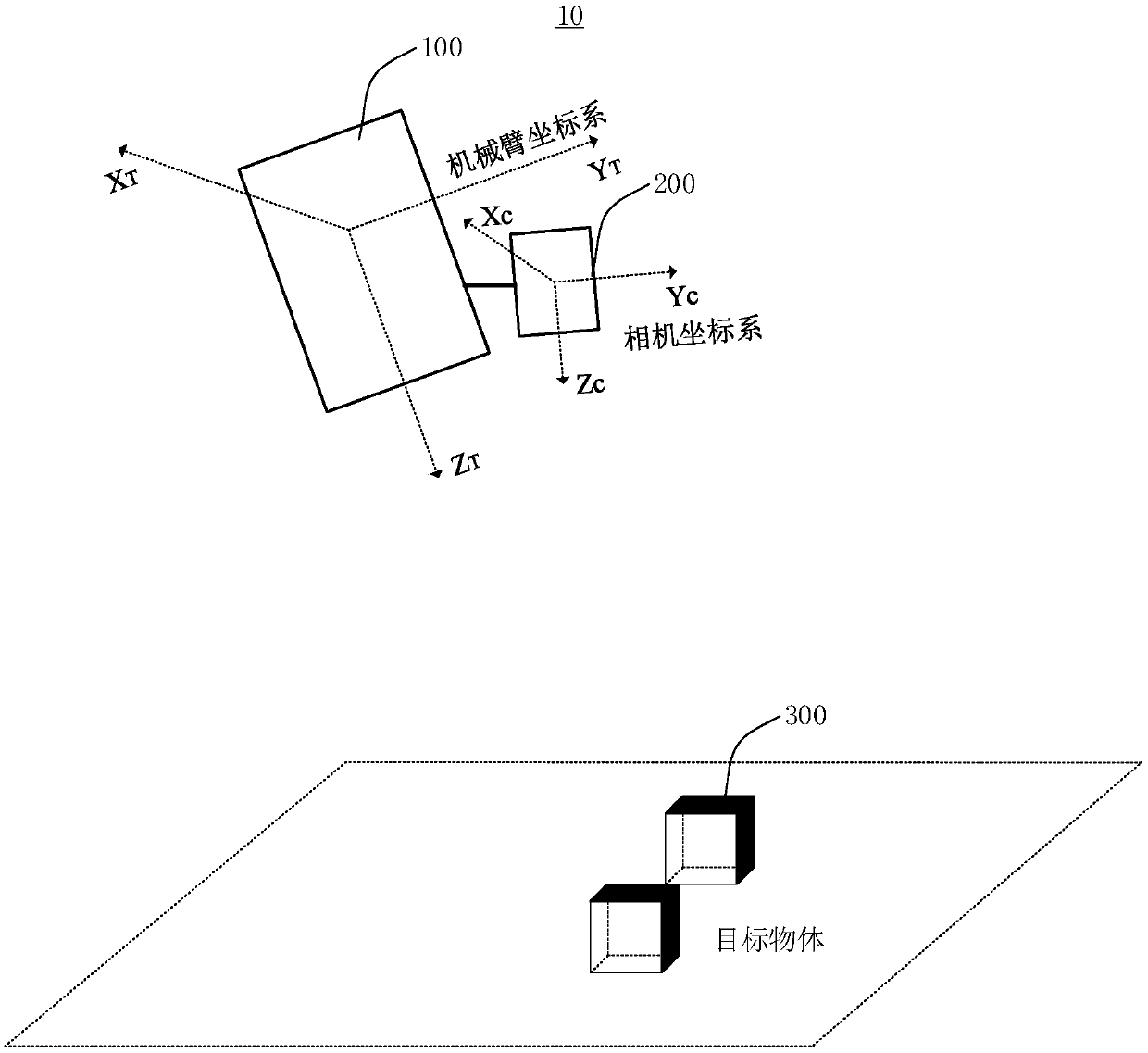
[0086] see image 3 or Figure 4, this embodiment provides a positioning robot arm 10 for implementing the method for positioning a robot arm provided in the first embodiment. The positioning robot 10 includes a robot system 100 and a depth camera 200 , the robot system 100 is connected to the depth camera 200 in communication, so as to transmit the second coordinate data in the camera coordinate system to the robot system 100 .
[0087] The positioning robot arm 10 provided in this embodiment can reduce the complexity of positioning the robot arm, and improve the environment perception ability and intelligent decision-making ability of the robot arm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com