Flying and climbing robot for bridge crack detection
A technology of robots and bridges, which is applied in the field of flying and climbing robots, can solve the problems of large hovering error of aircraft, limited endurance, and limitation of the working space of the bridge inspection vehicle's outrigger, so as to realize the perception of attitude, solve the problem of poor endurance, and realize The effect of stable flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In the following, the present invention will be further described in detail in conjunction with the accompanying drawings and embodiments, so as to make the purpose, technical solutions and advantages of the present invention more clear. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
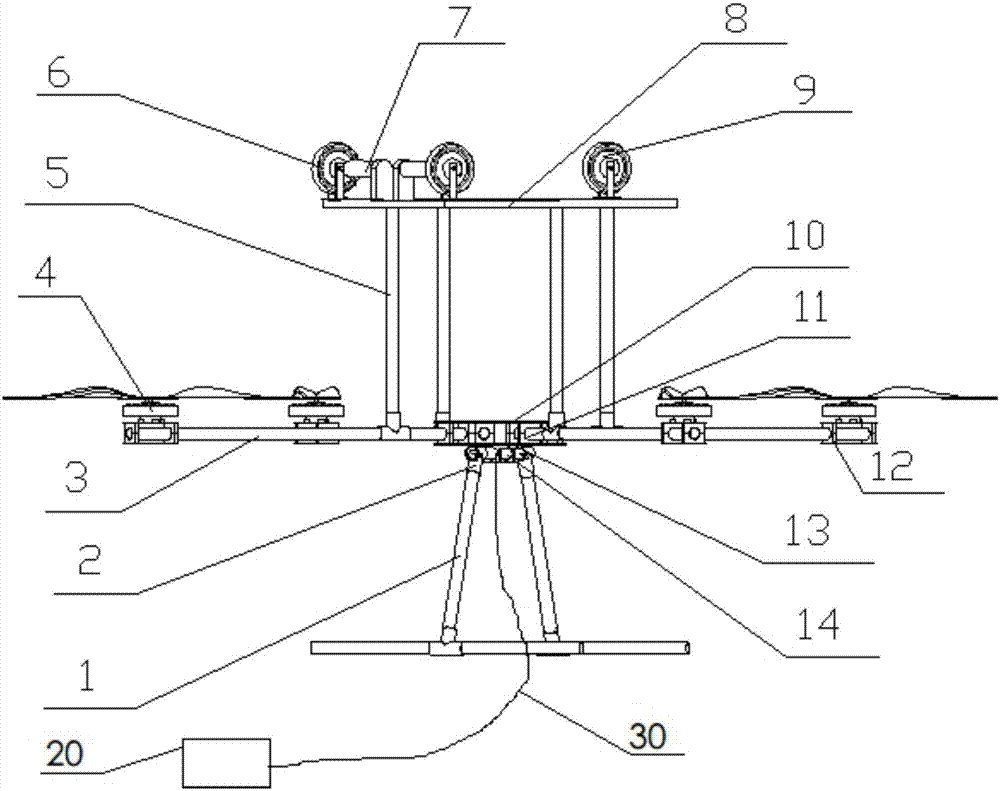
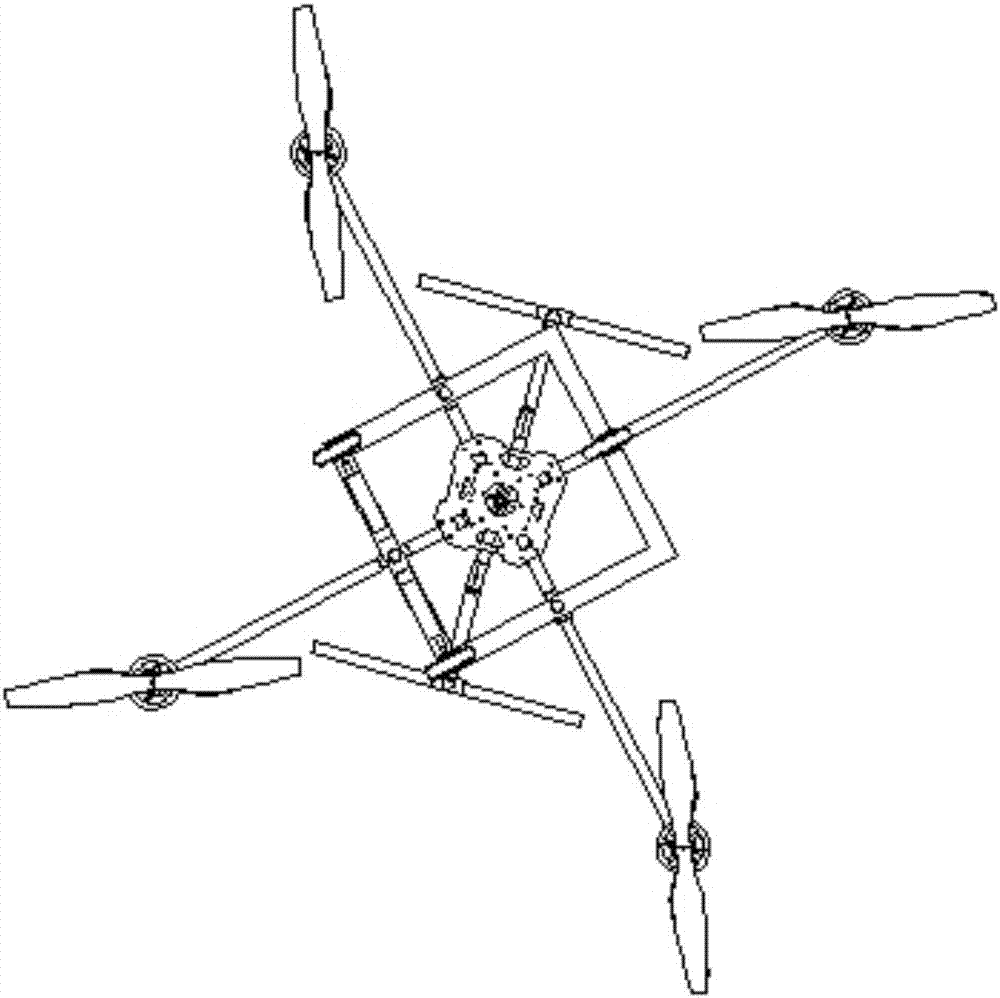
[0027] figure 1 with figure 2 A front view and a top view of the flying-climbing robot according to an embodiment of the present invention are respectively shown. The flying-climbing robot of this embodiment integrates four-axis aircraft, tethered balanced take-off, tethered cable power supply, and wall-mounted precise motion control. It can cling to the bottom of the bridge deck after hovering, and realize high Accuracy detection and power supply through the tethered rope to achieve continuous high-efficiency work.
[0028] Such as figure 1 As mentioned, one end of at least two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More