

Auto-disturbance rejection controller-based iterative learning contour error control method for networked multi-axis motion control system
An active disturbance rejection controller and iterative learning control technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as complex algorithms, unsuitable high-speed motion control, and limitations, and achieve good anti-disturbance ability, high-precision tracking control, and the effect of good single-axis trajectory tracking control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the technical scheme and design idea of the present invention clearer, a detailed description will be given below in conjunction with the accompanying drawings.
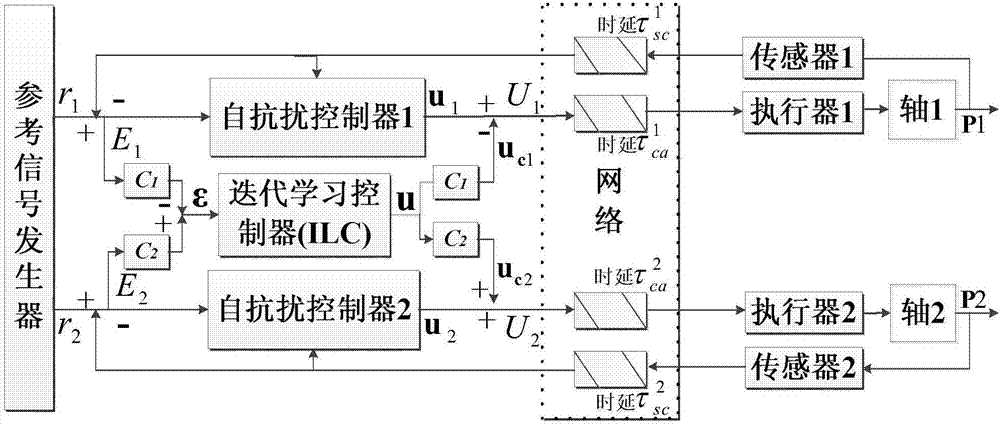
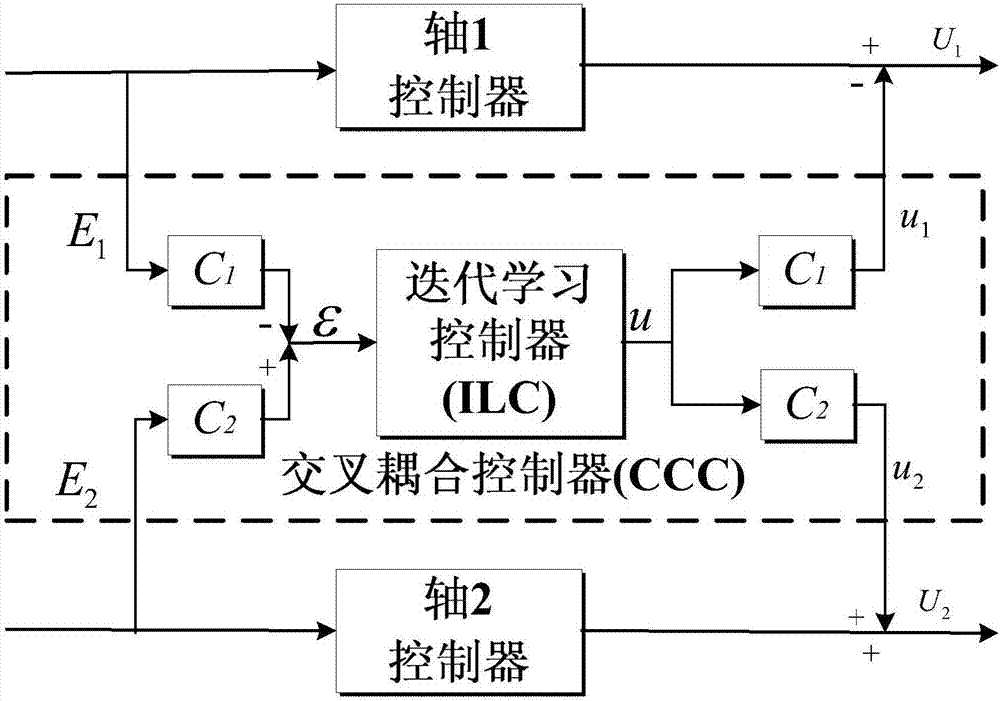
[0045] refer to Figure 1 to Figure 7 , an iterative learning contour error control method of a networked multi-axis motion control system based on an active disturbance rejection controller, said method comprising the steps of:
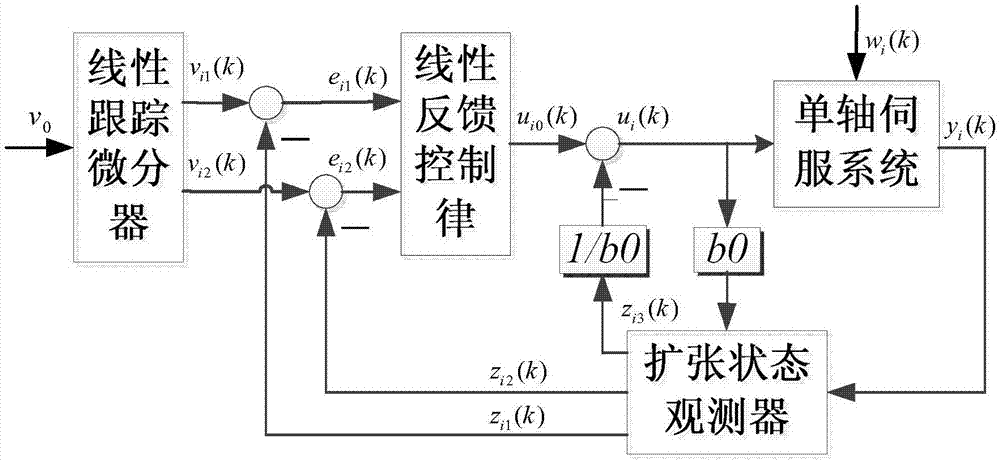
[0046] Step 1) Considering that the network-induced delay is less than one sampling period, a single-axis servo control system model with time-varying network-induced delay is established, and the networked single-axis servo control system is modeled as a one-step input delay Discrete-time linear time-varying system, and the system uncertainty caused by time-varying delay is dynamically processed as a part of the total disturbance of the system, and then the total disturbance of the system is expanded into a new variable, and the model of the networked single-axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More