A portable ankle rehabilitation robot based on active intention control
A rehabilitation robot and ankle joint technology, which is used in devices that help people move around, medical science, physical therapy, etc. The effect of comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments, but it is not used as a basis for any limitation of the present invention.
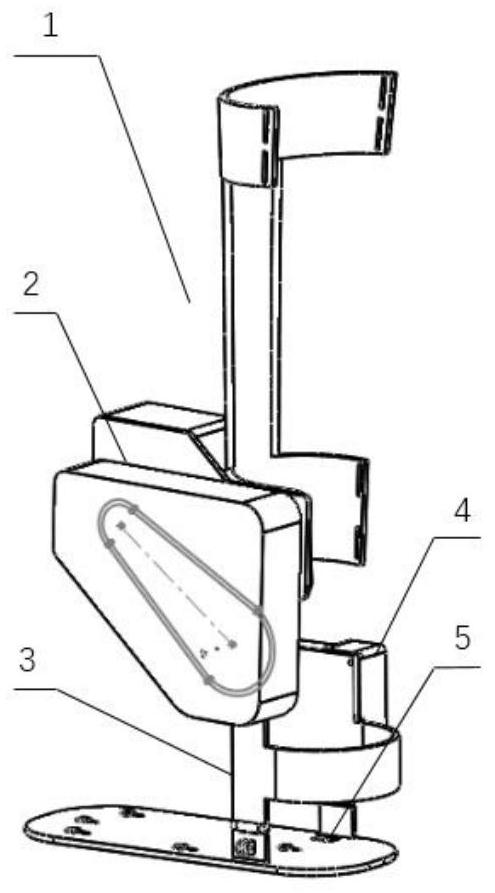
[0037] Such as figure 1 As shown, this embodiment describes that the present invention discloses a portable ankle joint rehabilitation robot based on active intention control, including a leg guard fixing mechanism 1, a walking aid mechanism 2 connected to one side of the leg guard fixing mechanism 1, and a walking aid mechanism 2 connected to the leg guard fixing mechanism 1, the foot plate mechanism 3 connected with the walking aid mechanism 2, and the gait correction mechanism 4, which is installed on the foot plate mechanism 3 and located on the right side of the whole machine, also includes the plantar pressure sensing system 5 integrated in the foot plate mechanism 3 and Microprocessor 30.
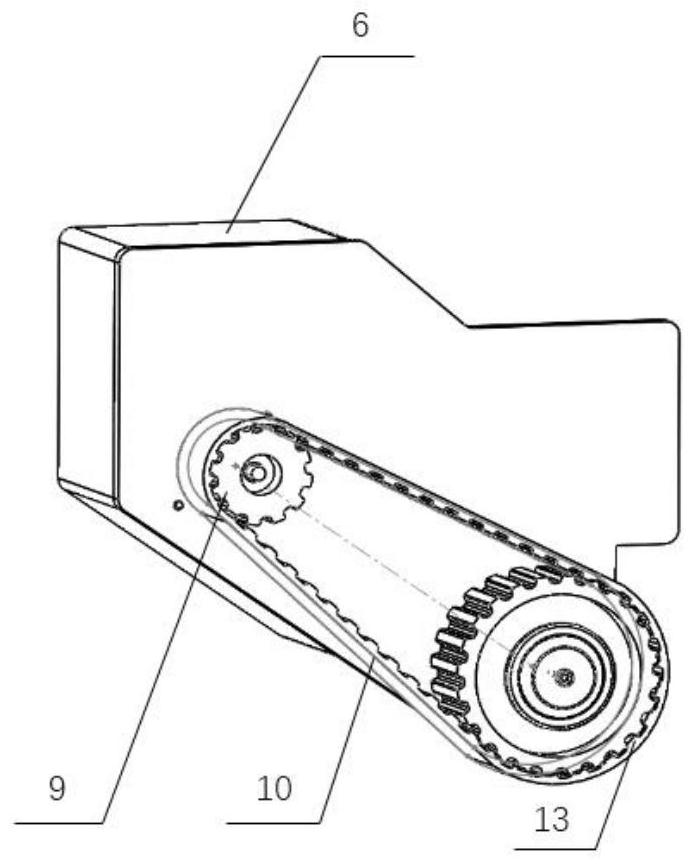
[0038] Such as figure 2As shown, using the principle of bionics, a leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More