

High-availability data collection method based on multiple AUVs in underwater sensor network
An underwater sensor and data collection technology, applied in network topology, advanced technology, transmission system, etc., can solve problems affecting network performance, long cruising path of autonomous underwater vehicle AUV, and no remedial measures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solutions of the present invention will be further elaborated below in conjunction with the accompanying drawings and embodiments.
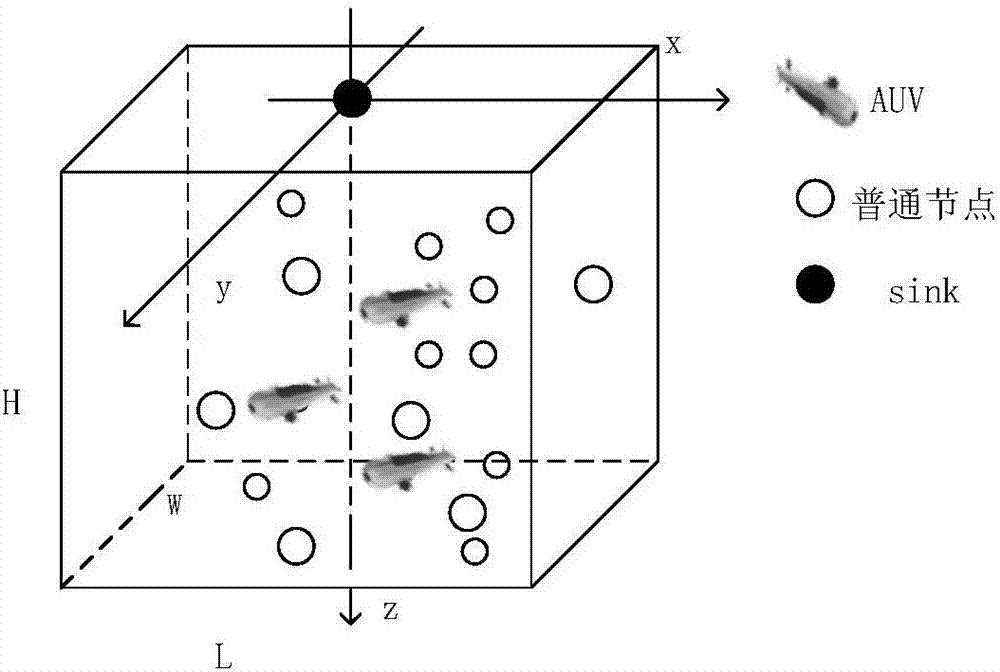
[0062] In the underwater sensor network of the present invention, based on the highly available data collection method of the multi-autonomous underwater vehicle AUV, at first, the underwater sensor network model is constructed, such as figure 1 As shown, the network model is a three-dimensional area of L·W·H. The sensor nodes need to predict the trajectory of the autonomous underwater vehicle AUV, so the nodes in the network and the autonomous underwater vehicle AUV must be time-synchronized, that is, the clocks of the sensor node and the autonomous underwater vehicle AUV are consistent. Due to the slow moving speed of the autonomous underwater vehicle AUV, strict complete time synchronization is not required, that is, a slight deviation of the clock of the sensor node and the autonomous underwater vehicle AUV has a neglig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More