

Confidence region algorithm-based multidimensional space contour error estimation method
A contour error and multi-dimensional space technology, applied in computer control, instrumentation, tracking/tracking, etc., can solve problems such as low control accuracy and large convergence impact, and achieve the effect of ensuring convergence and eliminating singular problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
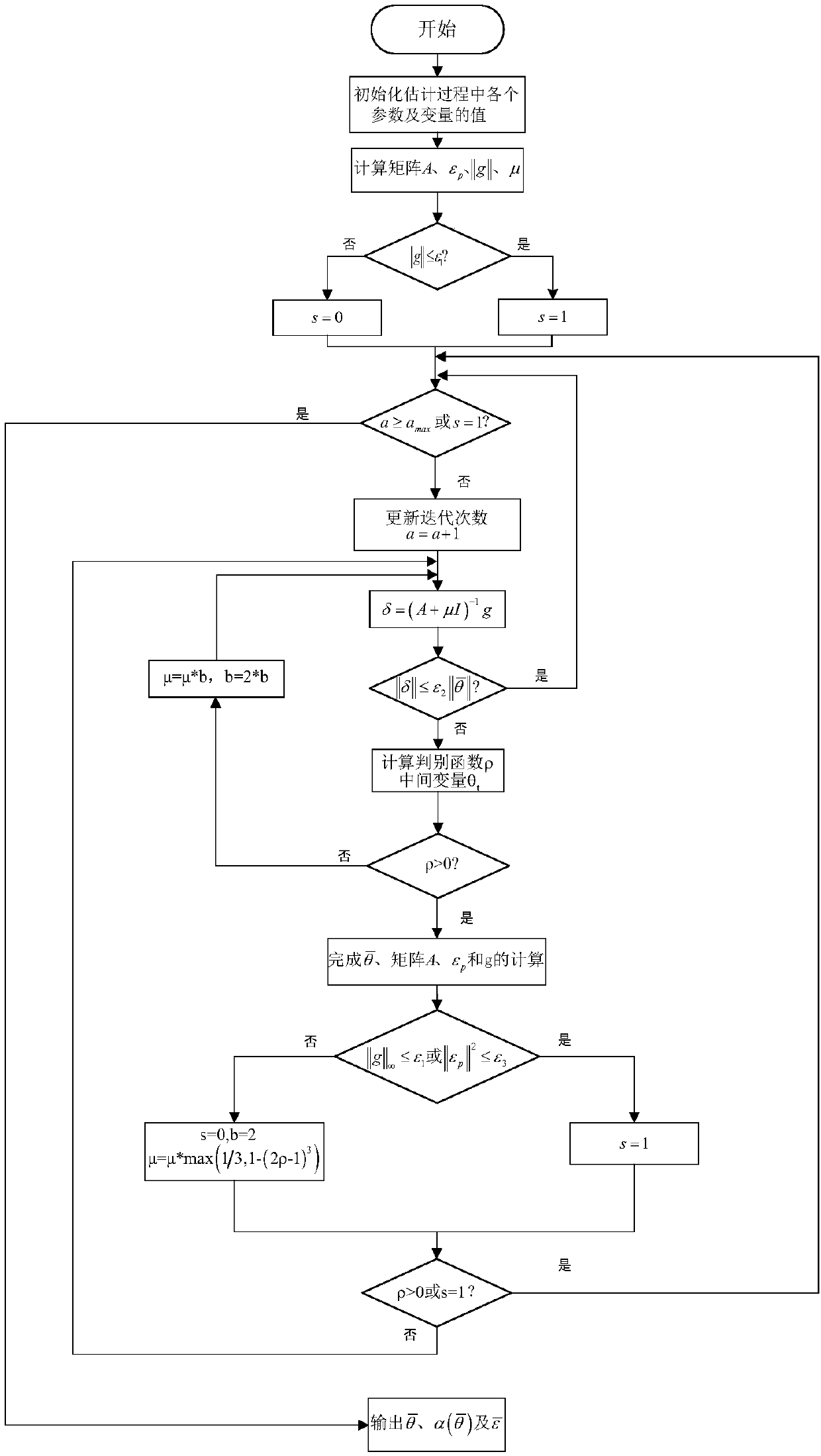
[0024] Specific implementation mode one: as figure 2 As shown, a multi-dimensional spatial contour error estimation method based on the confidence region algorithm includes the following steps:
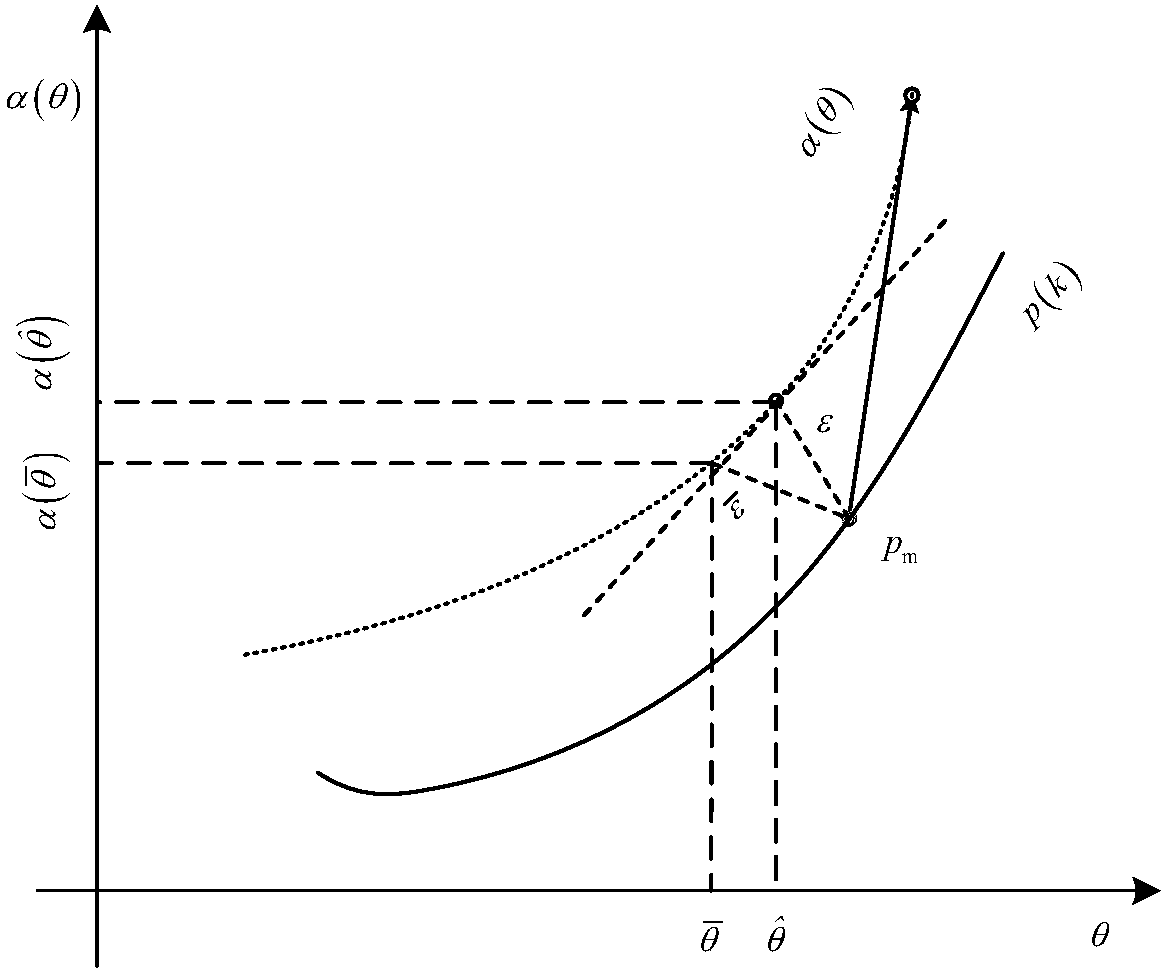
[0025] figure 1 The middle abscissa θ is a parameter variable, which represents the state here. For the multidimensional space contour problem, θ can be a multidimensional state variable, namely The ordinate α(θ) represents the parameter equation of the reference contour curve. For the problem of n-dimensional spatial contour error estimation, α(θ) is an n-dimensional spatial variable, namely (θ is the parameter in the curve parametric equation, claims state here. α (θ) is the parametric equation of reference profile curve, and the point on it has directly represented the position, for n-dimensional space profile error estimate α (θ)=[α 1 (θ) α(θ) 2 ... α n (θ)] T is an n-dimensional quantity). p(k) represents the actual position curve at each sampling moment, and k represen...
specific Embodiment approach 2
[0047] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is: in the step 1, the initialization iteration gain coefficient b=2 and the damping gain coefficient τ=10 -3 .
[0048] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0049] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is that the desired precision ε is set in the step one 1 =ε 2 =ε 3 =10 -5 .
[0050] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More