

Pressure compound control system of clamping mechanism of line patrol robot
A line inspection robot and clamping mechanism technology, applied in the mechanical field, can solve the problems that the clamping mechanism control system cannot overcome interference, achieve high stability, meet control requirements, and ensure stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with drawings and embodiments.
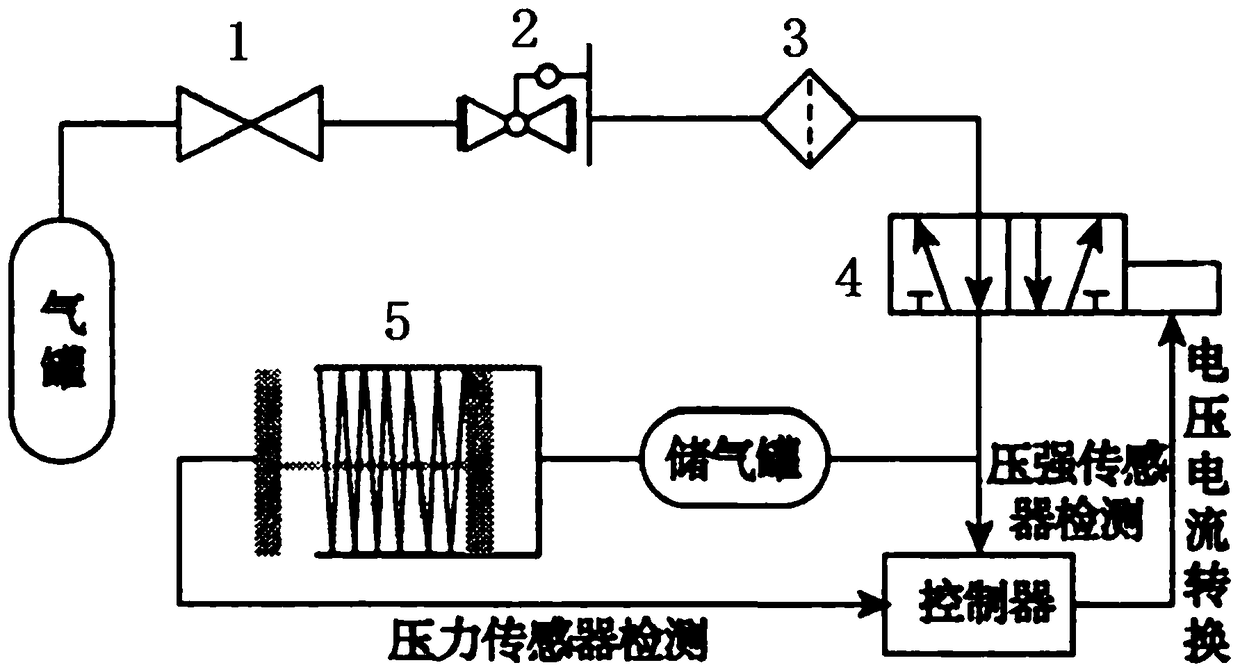
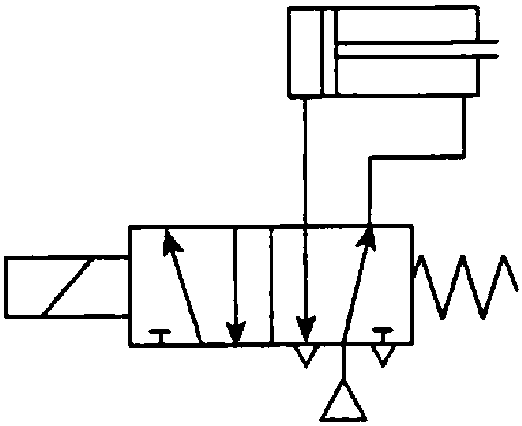
[0017] Such as figure 1 , The clamping mechanism adopts the cylinder proportional pressure control method to control the pressure in the clamping mechanism. The proportional pressure control in the electrical system mainly controls the displacement of the valve core of the proportional solenoid valve, so that the opening of the valve is proportional to the control voltage. By changing the opening of the proportional valve, the pressure rise and fall speed and pressure value in the pressure vessel are controlled. The advantage of using a proportional valve as a pressure control component is that the structure of the device is relatively simple, and it has better control accuracy and response speed.
[0018] Known from the structural design of the clamping mechanism above, controlling the pressure of the clamping mechanism is exactly the control of the thrust of the pist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More