

Multi-degree of freedom piezoelectric stick-slip micronano positioning platform and driving method thereof
A technology of micro-nano positioning and degree of freedom, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve complex control, small motion stroke, low positioning accuracy, etc. problem, to achieve the effect of improving output performance, reducing frictional resistance, and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
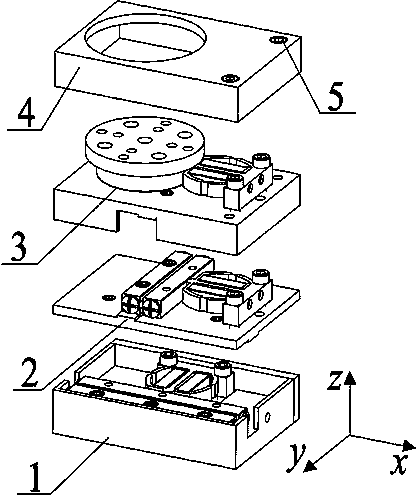
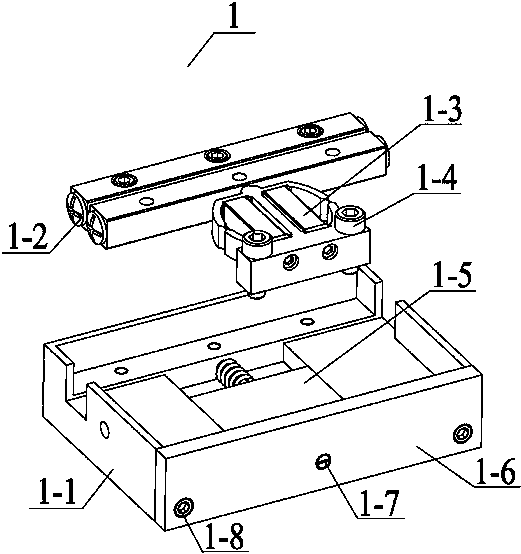
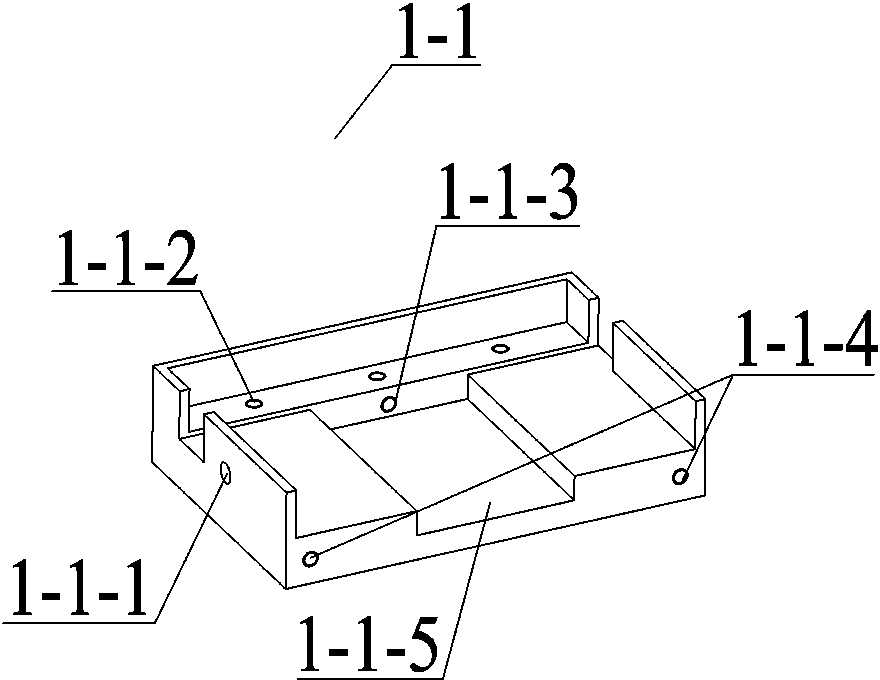
[0045] Specific implementation mode one: combine Figure 1~Figure 15 This embodiment mode is described, and this embodiment mode provides a specific implementation scheme of a multi-degree-of-freedom piezoelectric stick-slip micro-nano positioning platform. The multi-degree-of-freedom piezoelectric stick-slip micro-nano positioning platform and its driving method are composed of an x-direction driving component 1, a y-direction driving component 2, and a θ z The rotation assembly 3, the upper shell 4 and the connecting screw 3 5 are composed; the y-direction driving assembly 2 is fixed on the x-direction driving assembly 1 through the connecting screw 1-2-5 and the connection hole 1-2-5 screw connection, θ z The rotation assembly 3 is fixed on the y-direction drive assembly 2 through the threaded connection of the connection screw 2 3-5 and the connection hole 2 2-2-3, and the connection screw 3 5 passes through the countersunk hole 4-1 and the connection hole 3 3 -1-3 screw ...
specific Embodiment approach 2
[0051] Specific implementation mode two: combination Figure 16~Figure 17 This embodiment will be described. This embodiment provides a multi-degree-of-freedom piezoelectric stick-slip micro-nano positioning platform that implements a stator assembly with a chute structure. Its structural composition and connection method are the same as those in the first embodiment, except that the specific structure of the displacement conversion mechanism 1-3-1 in the stator assembly 1-3 is different.
[0052] The displacement conversion mechanism 1-3-1 is a chute frame structure, which is made of aluminum alloy 7075. The displacement conversion mechanism 1-3-1 is also provided with a driving foot 1-3-1-1 and a thickened beam 1 -3-1-2, chute 1-3-1-3, straight circular hinge Ⅰ1-3-1-4, rigid straight beam Ⅰ1-3-1-5, straight circular hinge Ⅱ1-3-1- 6. Straight round hinge III 1-3-1-7, rigid straight beam II 1-3-1-8, straight round hinge IV 1-3-1-9; the rigid straight beam I 1-3-1-5 two Ther...
specific Embodiment approach 3
[0053] Specific implementation mode three: combination Figure 18~Figure 19 This embodiment will be described. This embodiment provides a multi-degree-of-freedom piezoelectric stick-slip micro-nano positioning platform that realizes a stator assembly with an asymmetric structure. Its structural composition and connection method are the same as those in the first embodiment, except that the specific structure of the displacement conversion mechanism 1-3-1 in the stator assembly 1-3 is different.
[0054] The displacement conversion mechanism 1-3-1 is an asymmetrical frame structure, which is made of aluminum alloy 7075. The displacement conversion mechanism 1-3-1 is provided with a stator installation hole 1-3-1-10, and through the stator installation hole 1-3-1-10 The displacement conversion mechanism 1-3-1 can be fixed on the base 1-1, and the displacement conversion mechanism 1-3-1 is provided with a straight circular hinge I 1-3-1-4, Rigid straight beam Ⅲ 1-3-1-13, straig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More