Three-DOF (degree of freedom) flexible joint structure
A technology of flexible joints and degrees of freedom, applied in the field of flexible robots, can solve the problems of joint wear, lack of flexibility, and reduced robot life, and achieve the effect of increasing flexibility, prolonging service life, and good flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
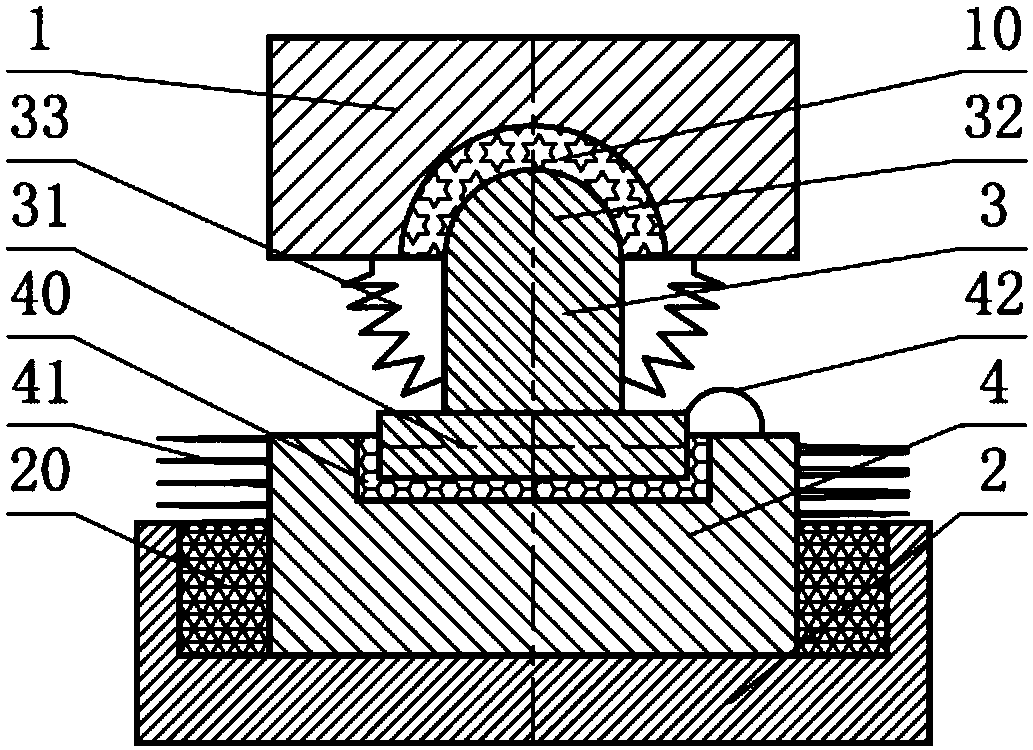
[0018] see figure 1 As shown, a three-degree-of-freedom flexible joint structure of the present invention includes a first connecting part 1 that can be connected with the robot head, a second connecting part 2 that can be connected with the robot body, and a rotating joint relative to the first connecting part 1. The compound joint main body A3 and the compound joint main body B4 that can be twisted relative to the second connecting member 2, the compound joint main body A3 and the compound joint main body B4 can rotate relative to each other.
[0019] see figure 1 As shown, the bottom of the first connector 1 is provided with a groove with a semicircular cross section, the upper end of the composite joint body A3 is a semi-cylindrical protrusion 32, the lower end is a cylindrical protrusion 31, and the middle is a cylindrical strai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More