

Unmanned aerial vehicle swarm cooperative navigation method under dynamic mutual observation relation condition
A technology of collaborative navigation and relational conditions, applied in the field of positioning and navigation, it can solve the problems of difficult to effectively suppress inertial navigation errors and degradation of navigation performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
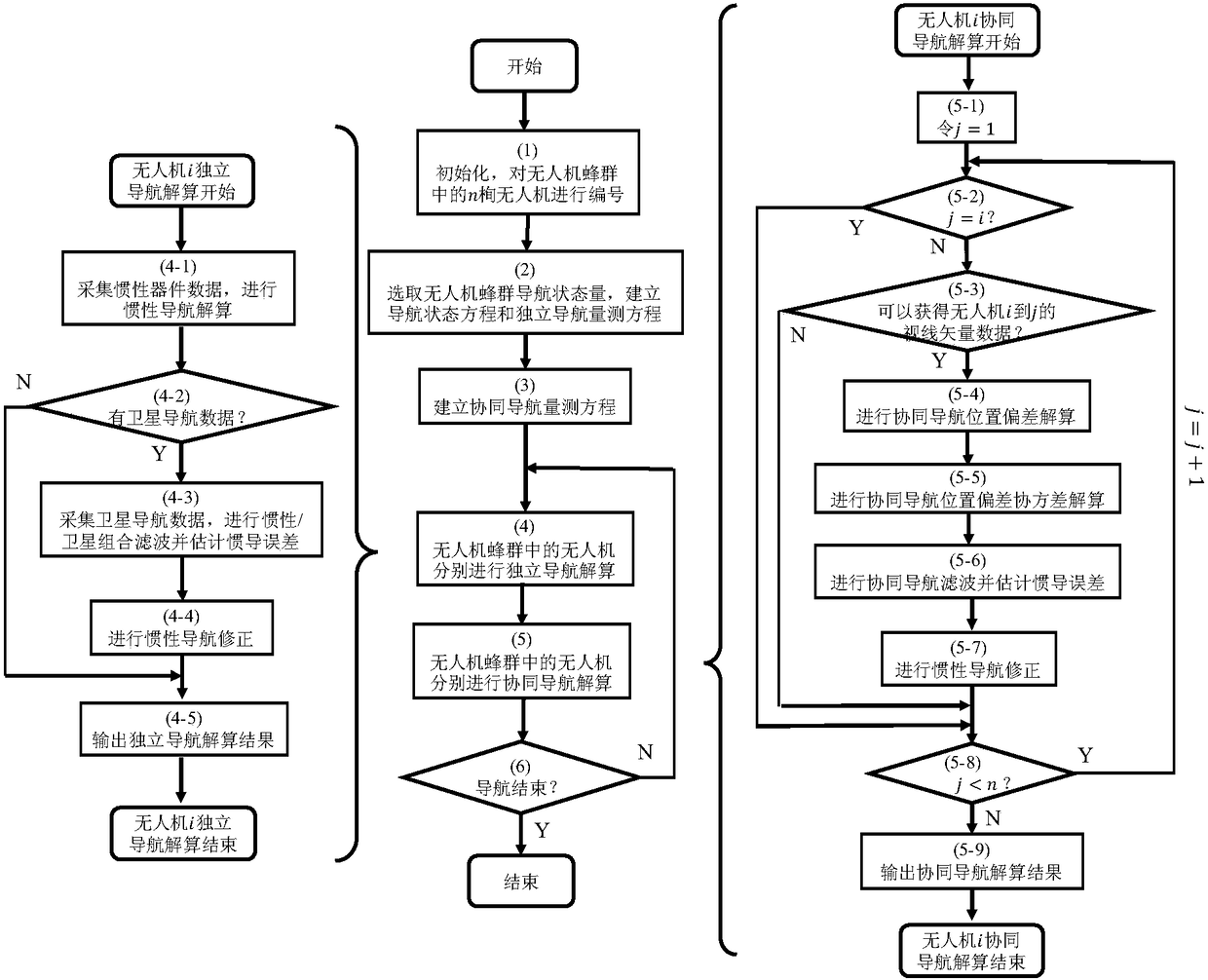
[0067] like figure 1 As shown, the present invention provides a method for cooperative navigation of unmanned aerial vehicle bee colonies under the condition of dynamic mutual observation relationship, comprising the following steps:
[0068] Step 1, initialization, numbering the drones in the drone colony according to 1~n;
[0069] Step 2: Select the UAV swarm navigation state quantity, establish the navigation state equation and the independent navigation measurement equation; for any UAV i, i∈{1,2,…,n}, the navigation state quantity expression The formula is:
[0070]
[0071] Among them, φ E ,φ N ,φ U Respectively represent the eastward platform error angle state quantity, northward platform error angle state quantity and skyward platform error angle state quantity in the error state quantity of UAV i airb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More