Unmanned aerial vehicle anti-collision method based on Internet
A drone and Internet technology, applied in the field of drone communication, can solve the problems of not installing anti-collision devices, not being able to enter public airspace, and not being able to share airspace resources, so as to reduce the risk of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
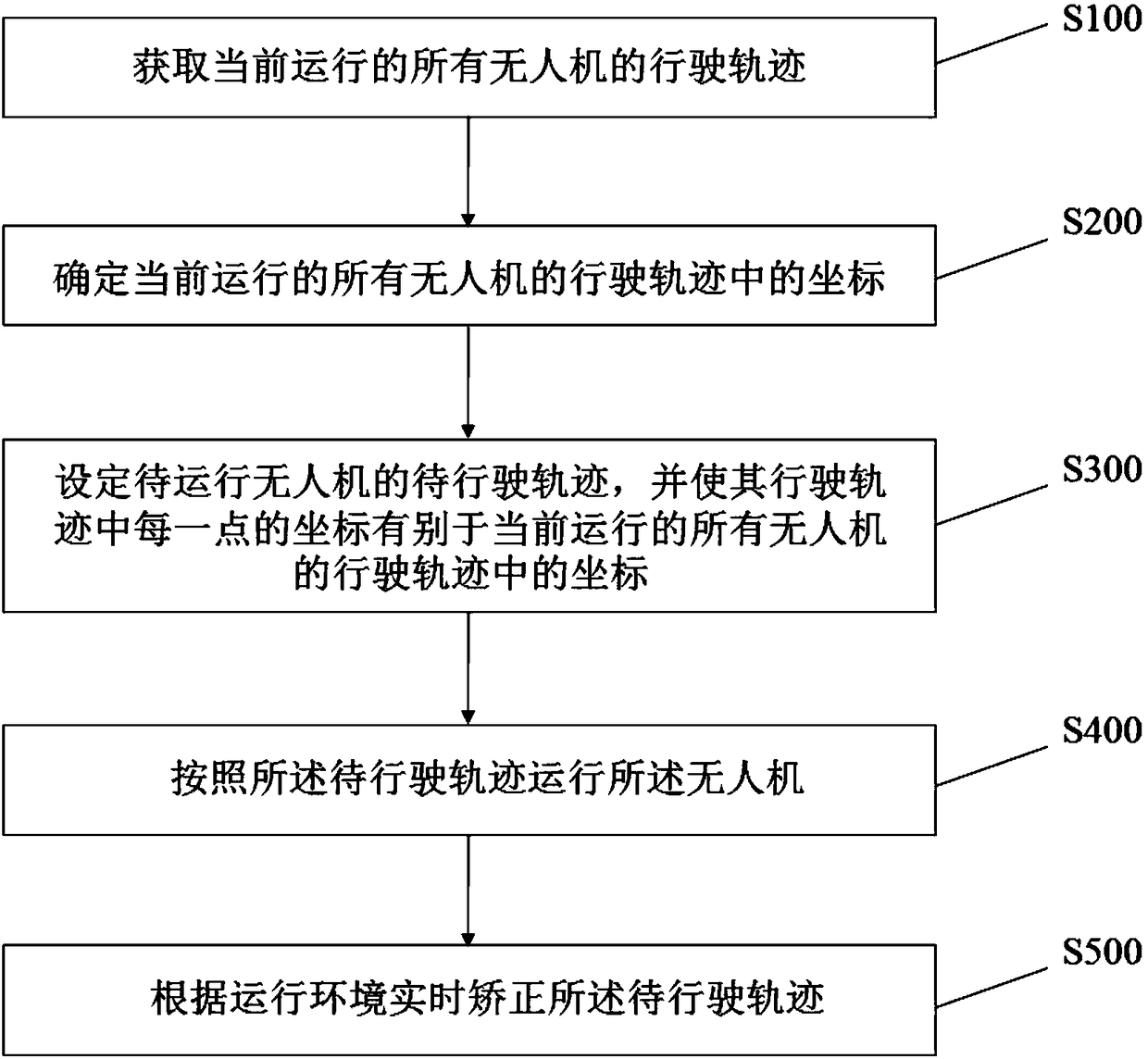
[0029] figure 1 A flow chart of an Internet-based UAV collision avoidance method according to an embodiment of the present invention is shown. Such as figure 1 As shown, the Internet-based UAV anti-collision method provided by the present invention comprises the following steps:
[0030] S100. Acquiring the driving trajectories of all currently operating drones;
[0031] S200. Determine the coordinates in the driving trajectories of all currently running drones;
[0032] S300. Set the trajectory to be driven of the unmanned aerial vehicle to be operated, and make the coordinates of each point in the trajectory different from the coordinates in the trajectory of all the currently operating drones.
[0033] Wherein, in step S100, obtaining the travel tracks of all unmanned aerial vehicles currently running includes the following steps:
[0034] S110. The control system of the drone sends the unique ID and current coordinates of the drone to the ground base station;
[0035]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com