

Tightness-adjustable automatic operation device
An operating equipment and elastic technology, which is applied in the field of automatic operating equipment, can solve the problems of restricting the application field of grasping and climbing auxiliary devices, the danger of staff working at heights, and single-targetedness, so as to improve operating efficiency, reduce labor intensity, and improve grasping and climbing. speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the explanatory text.
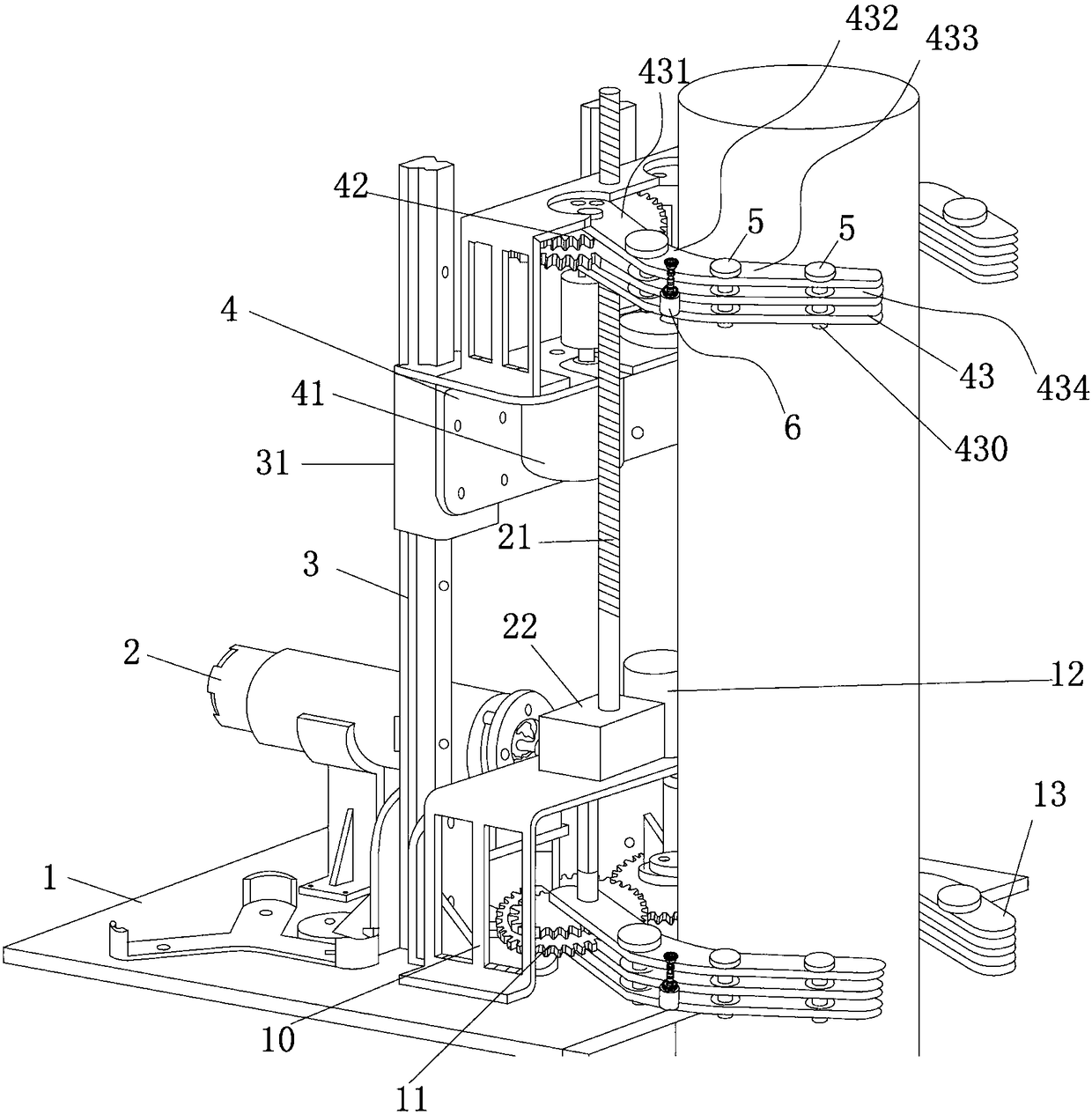
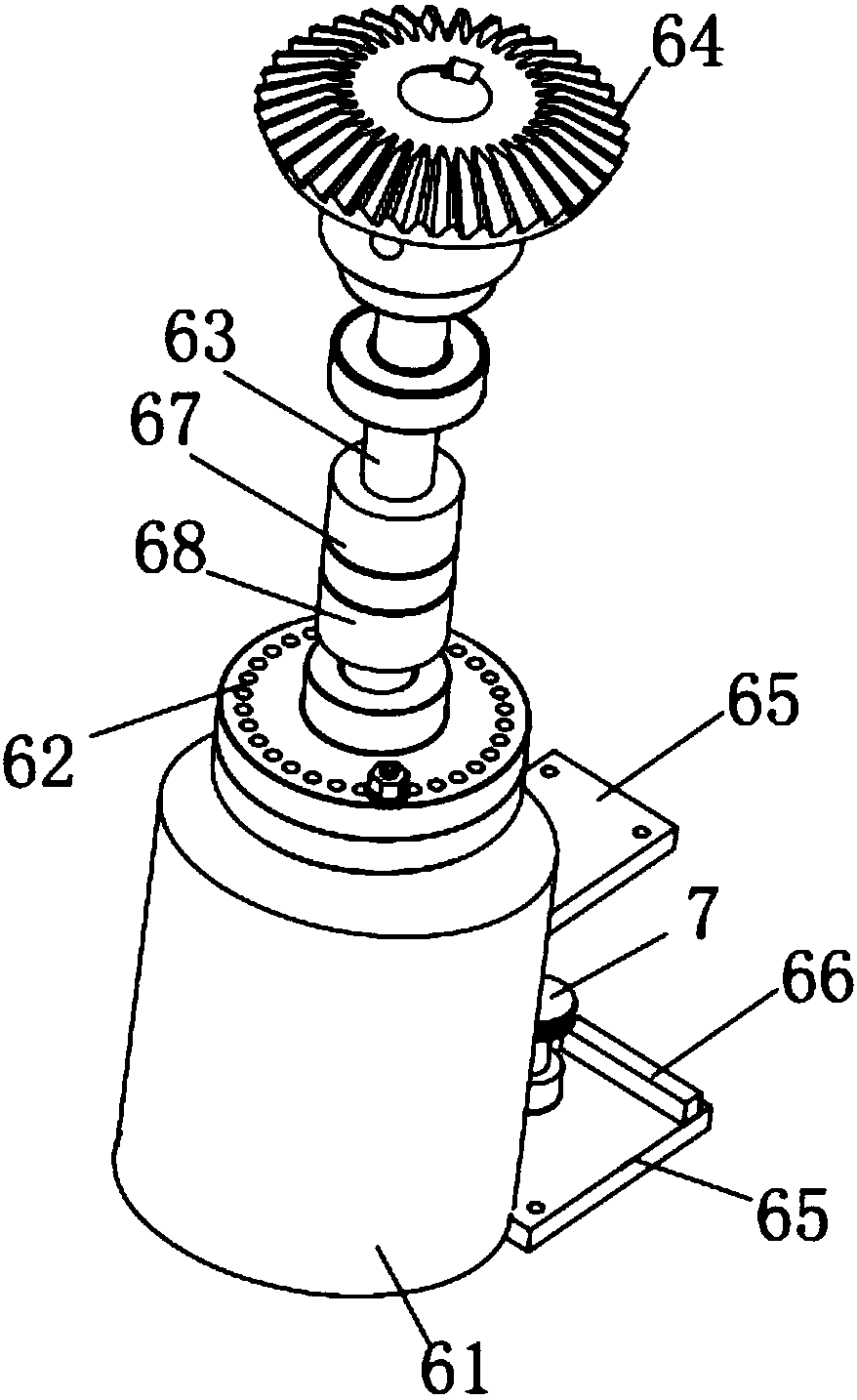
[0036] Such as Figure 1-6 As shown, the present invention provides an automatic operation device with adjustable elasticity, which includes a display module, an infrared distance measuring module, a manipulator, a rotating and telescopic module, and a driving mechanism.
[0037] Specifically, the LCD display module is arranged on the top of the operating equipment to realize the real-time display of the status of the upper and lower manipulators and the current position of the operating equipment. The LCD display module is connected with the controller of the operating equipment. Buttons are used to control the controller, and finally the buttons control the start and stop of the running equipment, the grasping and releasing of the manipulator, the rotation process of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More