Robot positioning grabbing method and system based on laser visual guidance
A robot positioning and visual guidance technology, applied in the field of robot vision, can solve the problems of slow target recognition process, low work efficiency, and low precision, and achieve the effects of easy promotion, accelerated recognition speed, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
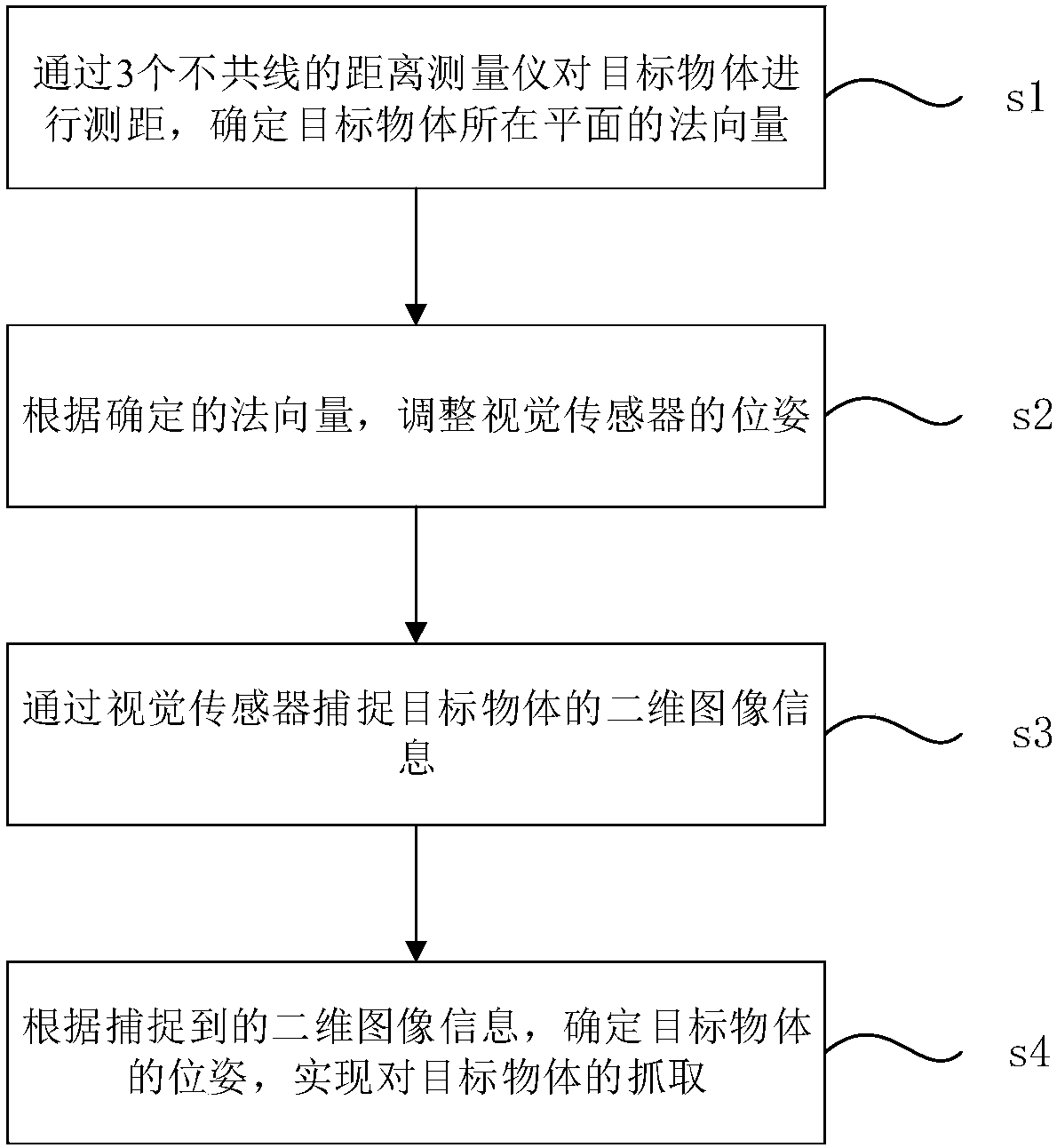
[0041] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
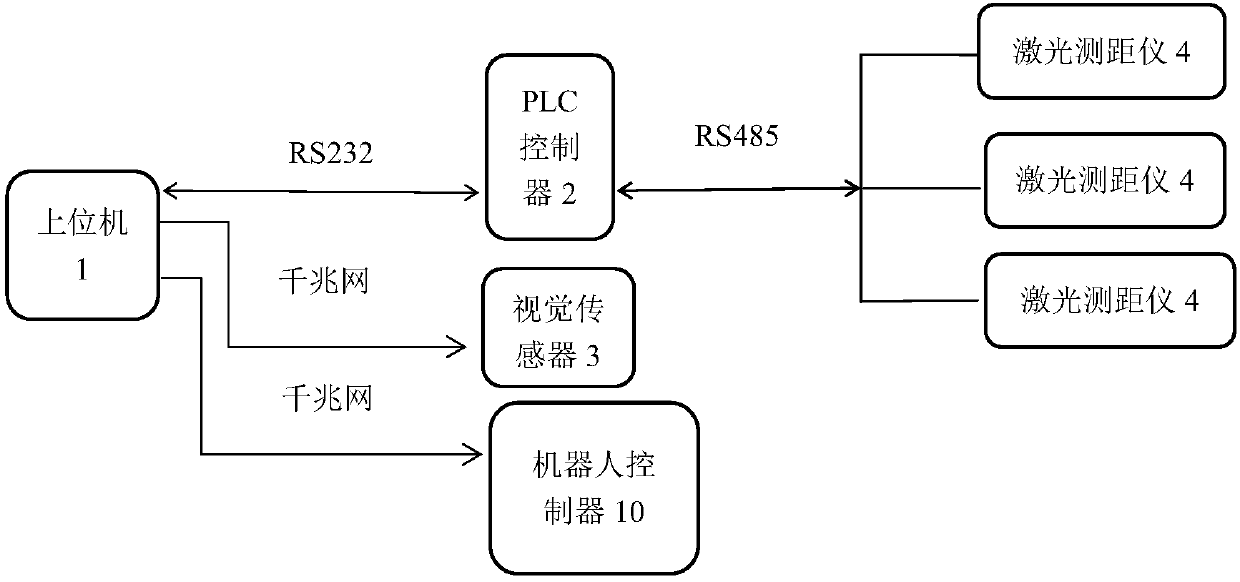
[0042] Such as figure 2 As shown, this embodiment proposes a robot positioning and grasping system based on laser vision guidance, including a positioning and grasping arm, a PLC controller 2 and a host computer 1, and the PLC controller 2 is packaged inside the positioning and grasping arm, and is connected with the The upper computer 1 is connected, and the visual sensor 3 connected to the PLC controller 2 is provided on the positioning grabbing arm, and three non-collinear distance measuring instruments are provided on the plane where the visual sensor 3 is located. The distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More