

Movable mechanical arm control system and method based on MR and motion planning technology
A mobile robot arm and motion planning technology, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools, can solve problems such as poor mobility, unsatisfactory precision control, and poor remote control experience in dangerous areas.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments. The descriptions here are used to provide a further understanding of the present invention and constitute a part of the application. The exemplary embodiments of the present invention and their descriptions are used to explain the present invention and do not constitute improper limitations to the present invention.
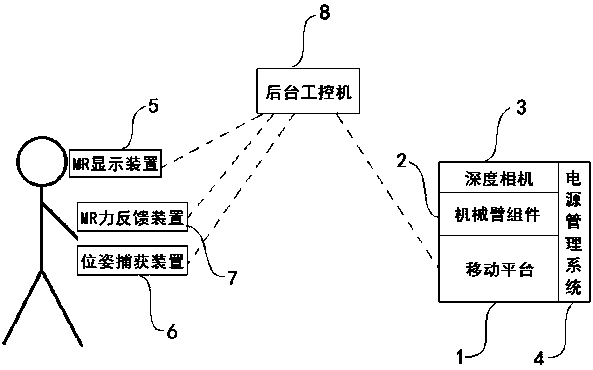
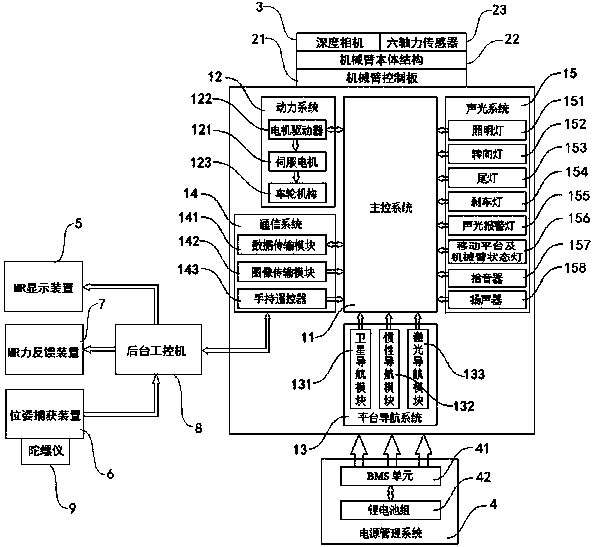
[0061] see Figure 1~2 As shown, a movable manipulator control system based on MR and motion planning technology, including mobile platform 1, manipulator assembly 2, depth camera 3, power management system 4, MR display device 5, pose capture device 6, MR Force feedback device 7 and background industrial computer 8.
[0062] The mobile platform 1 is composed of a main control system 11, a power system 12, a navigation system 13, a communication system 14 and an acousto-optic system 15;
[0063] Described main control s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More