

Position and attitude active disturbance rejection control method for space robot based on sampling output
A space robot, active disturbance rejection control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention is described in further detail below in conjunction with accompanying drawing:
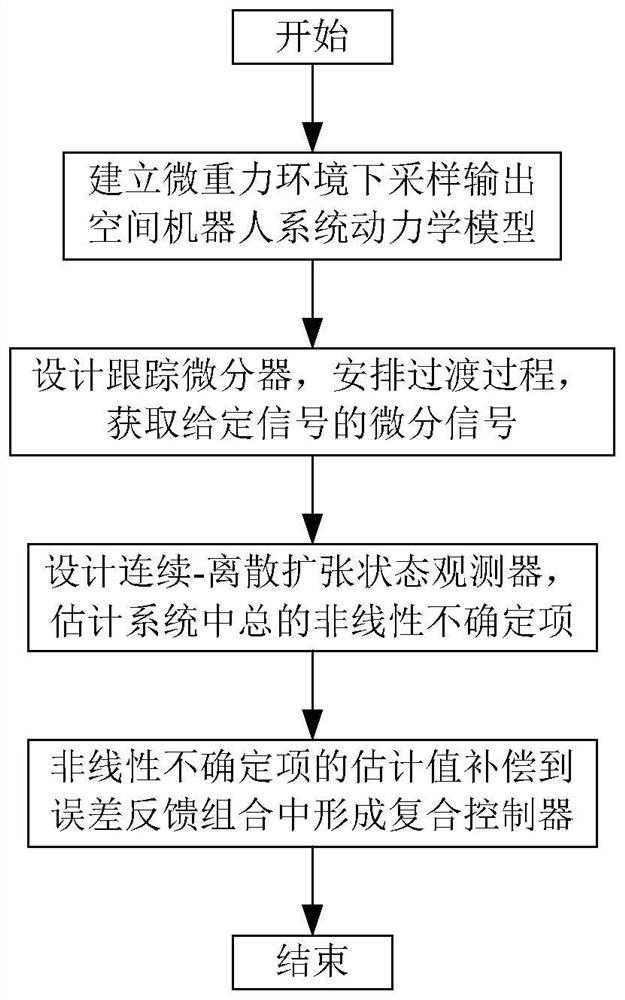
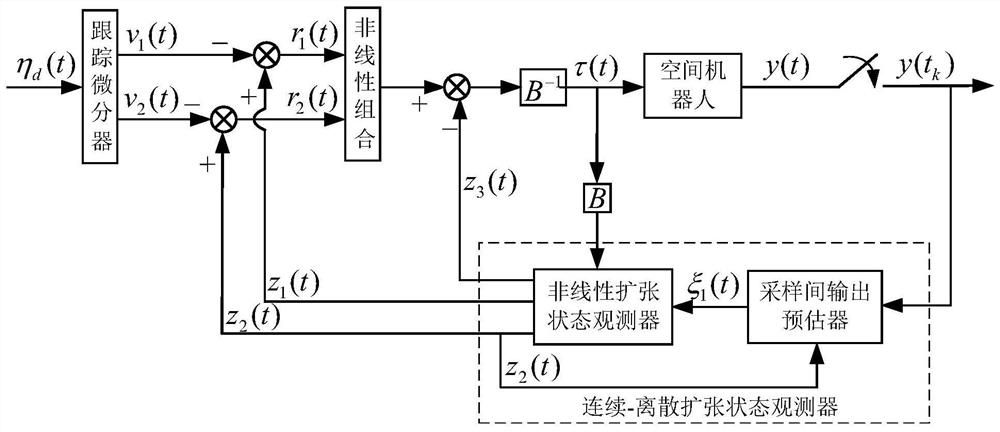
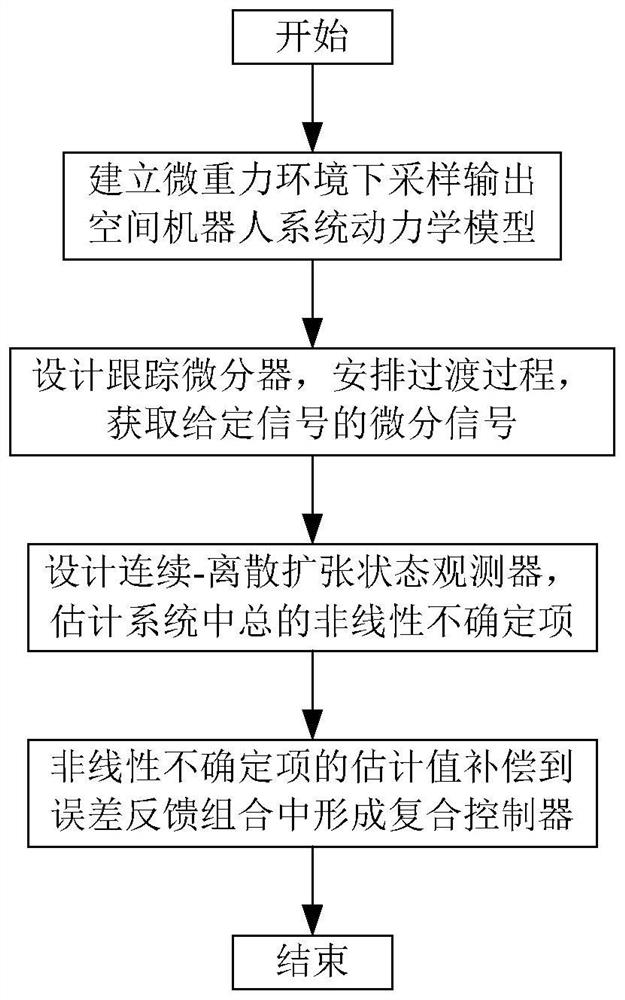
[0059] see figure 1 with 2 , the present invention is based on the sampling output space robot position and attitude ADR control method, comprising the following steps:
[0060] Step 1: Construct the dynamic model of the space robot system in the microgravity environment
[0061] Establish geographic coordinate system Ox n the y n z n ; x, y, z respectively refer to the space robot at Ox n 、Oy n and Oz n The location of the direction, n is the label of the geographic coordinate system, θ and ψ refer to the roll angle, pitch angle and yaw angle of the space robot respectively; establish the space robot body coordinate system Ox b the y b z b ; u, v, w are space robot linear velocity vectors, p, q, r are space robot angular velocity vectors, b is the label of the body coordinate system; according to Ox n the y n z n with Ox b the y b z b relationship, e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More