

Automatic tracking method of double-foot robot
A bipedal robot and automatic tracking technology, which can be used in motor vehicles, instruments, non-electric variable control, etc., can solve the problems of high control difficulty and difficult control accuracy to reach wheeled robots, etc. Interference ability, the effect of reducing the amount of data processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] see figure 1 As shown, a method for automatic tracking of a biped robot, including:
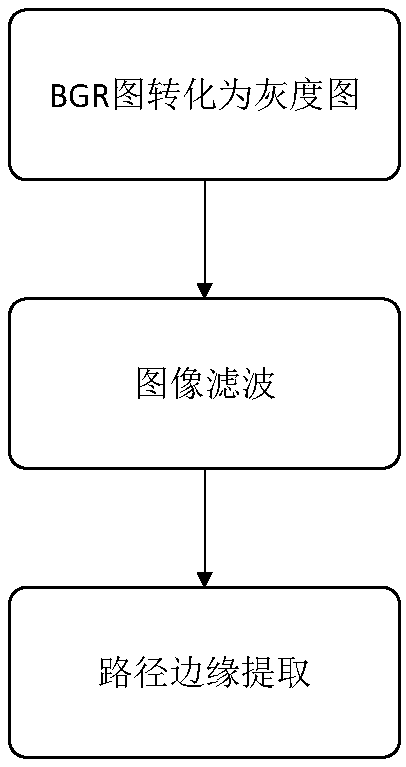
[0062] Step 101, the visual sensor installed on the biped robot sends the image information of the navigation path under the robot's feet to the processor;
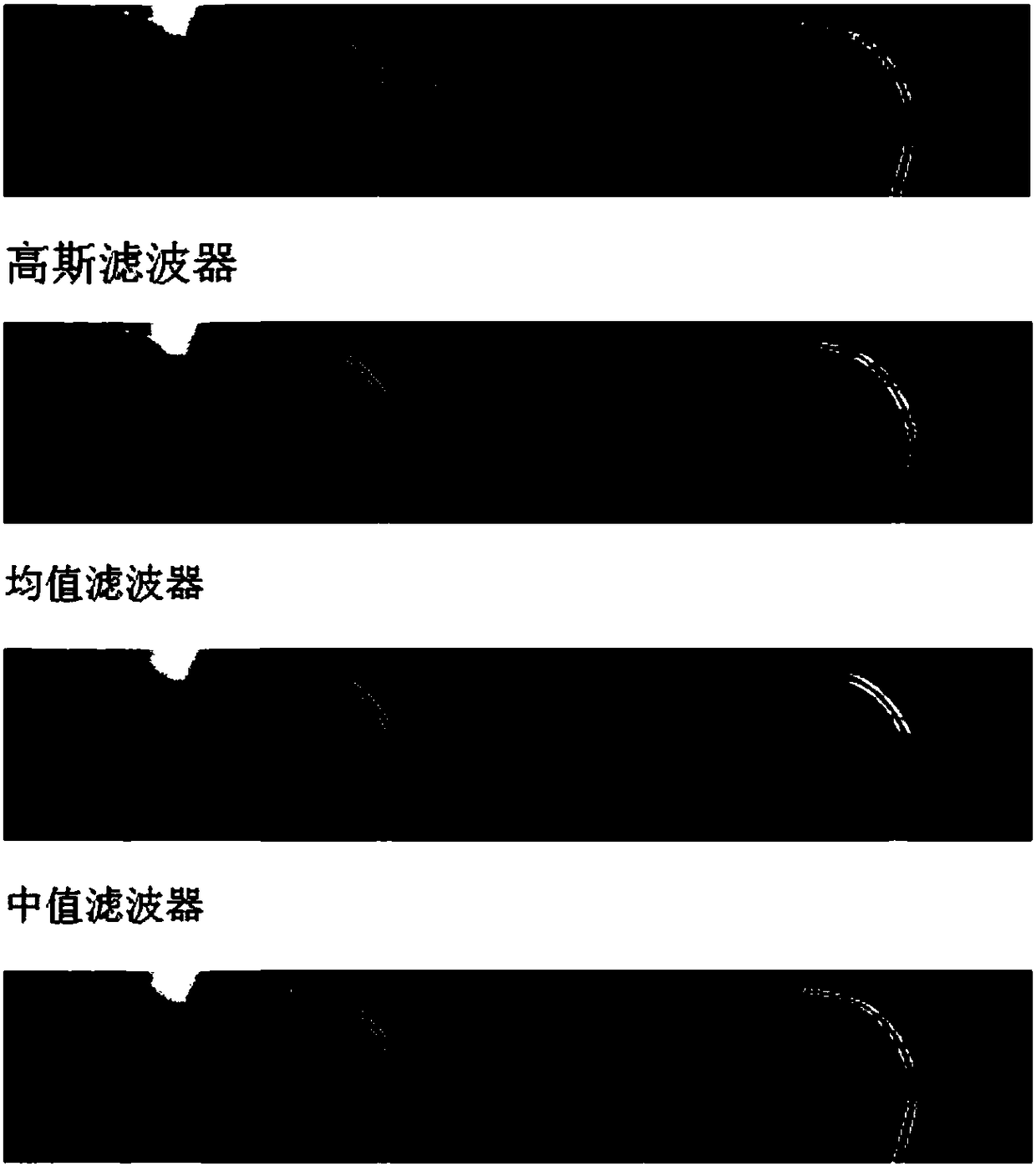
[0063] Step 102, the processor processes the received image information of the navigation path, obtains the relative positional relationship between the current attitude of the robot and the navigational path, and sends it to the controller; the relative positional relationship includes an angle deviation and a positional deviation;
[0064] Step 103, the controller controls the robot to adjust the walking path according to the received angle deviation and position deviation to realize automatic tracking.
[0065] It should be noted that the processor and controller in the above steps may be integrated on the biped robot, or may be separately arranged processor and controller, which are not specifically limited in this embodiment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More