

Quadruped robot self-adjusted from any posture in air to landing posture
A quadruped robot, self-adjusting technology, applied in the direction of manipulators, motor vehicles, program-controlled manipulators, etc., can solve the problems of increasing the volume, quality and system complexity of the robot, the inability to adjust the robot's arbitrary attitude, and the difficulty of the robot, etc., to achieve The mechanism design is light, the mechanism design is concise, and the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with the accompanying drawings.
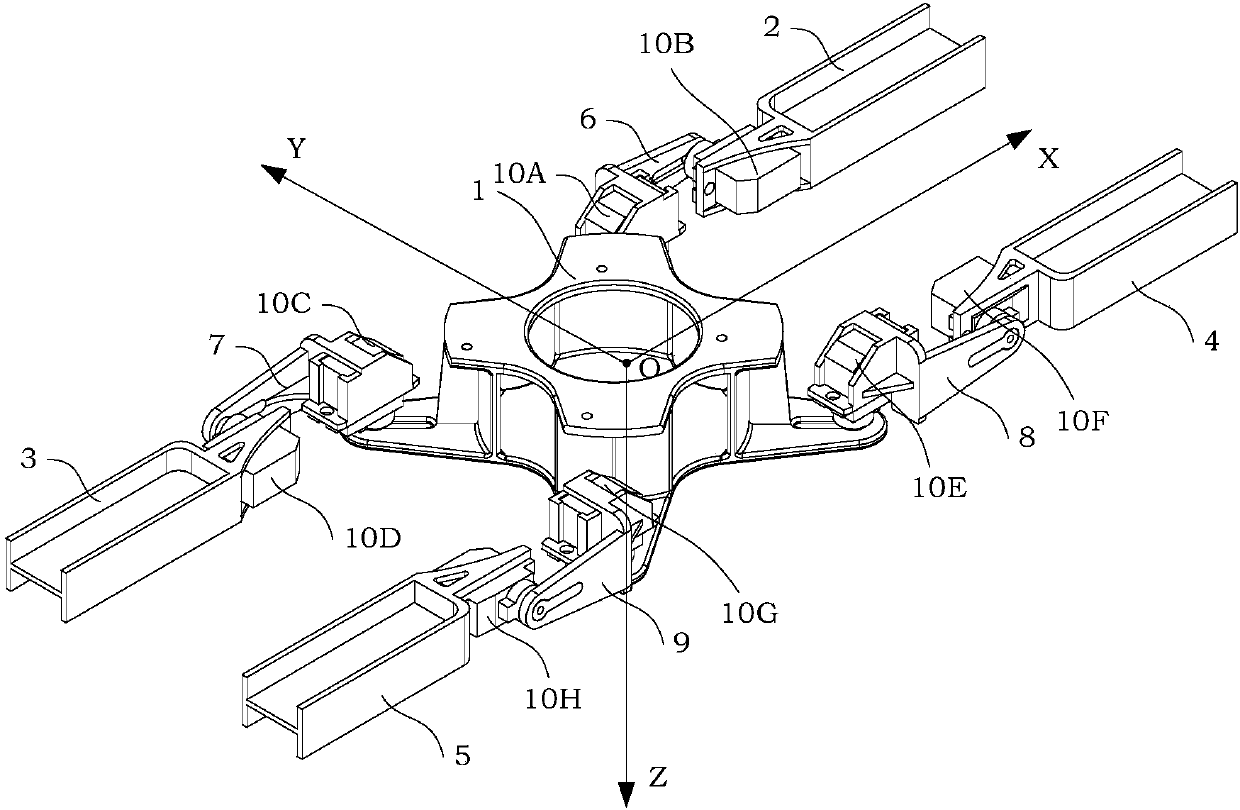
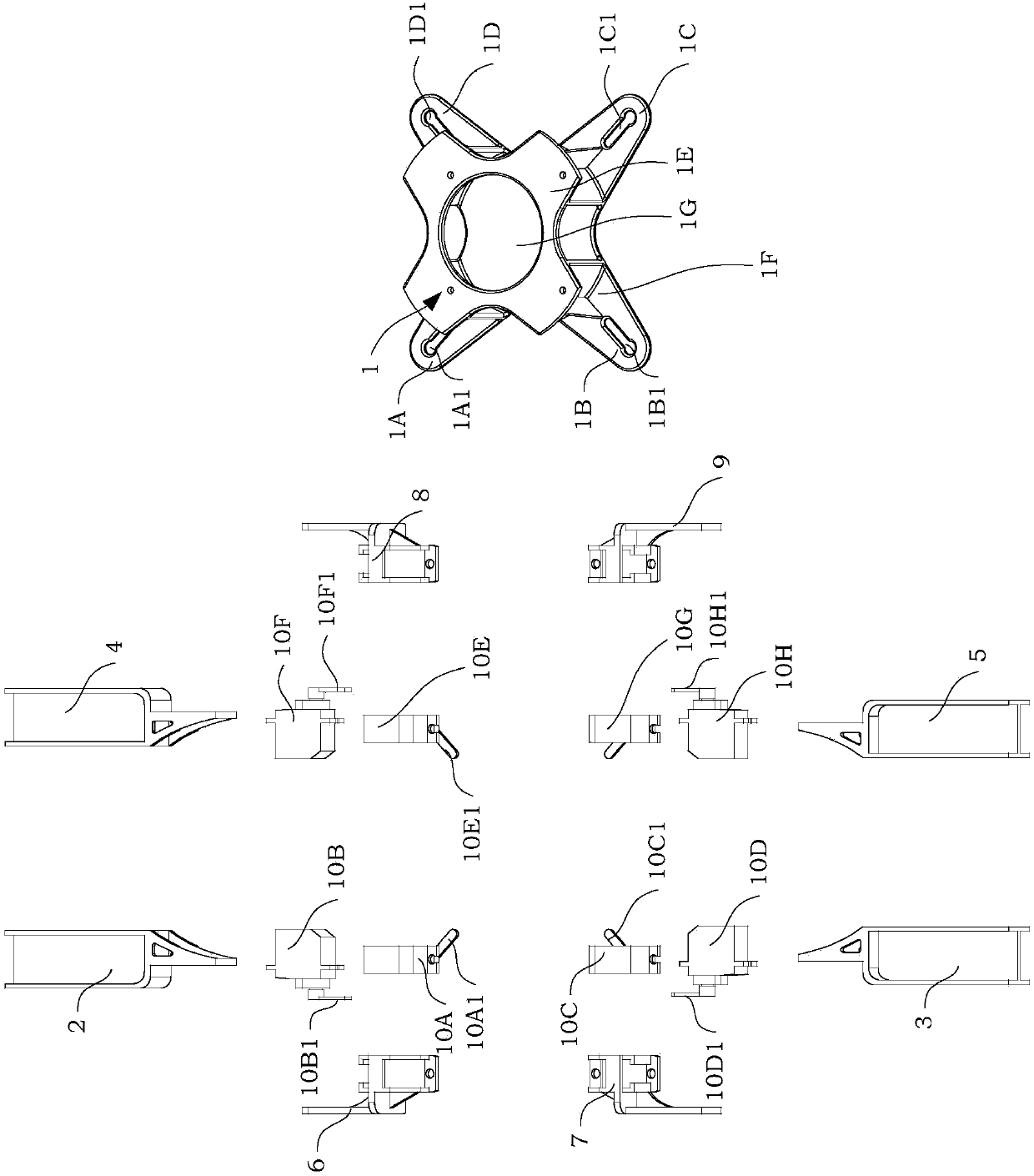
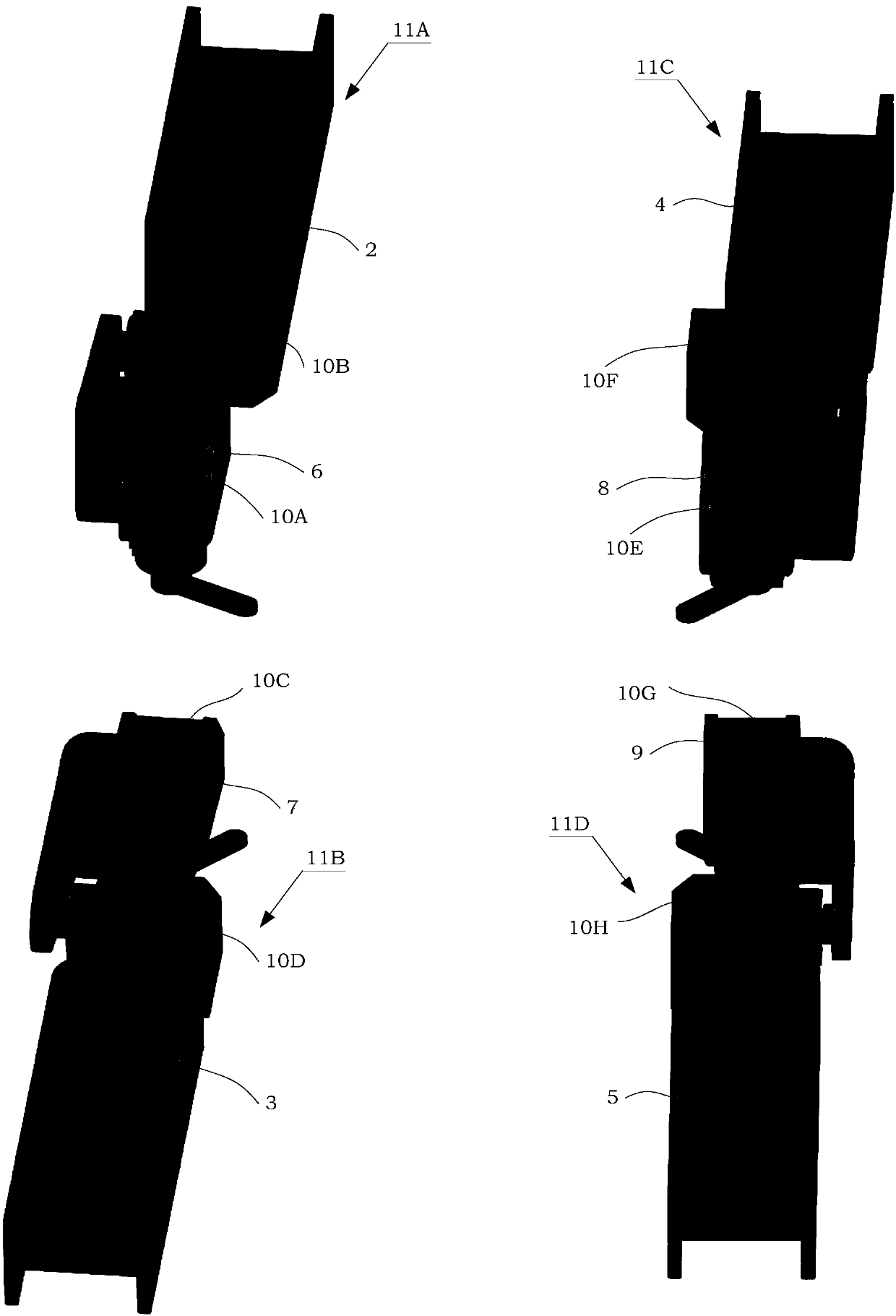
[0049] see figure 1 , Figure 1A As shown, a quadruped robot designed by the present invention to self-adjust from any posture in the air to the posture on the ground is composed of a trunk body 1, a left forelimb 2, a left hind limb 3, a right forelimb 4, a right hind limb 5, a first joint frame 6, The second joint frame 7, the third joint frame 8, the fourth joint frame 9 and 8 steering gears;
[0050] Wherein, the left forelimb 2, the left hindlimb 3, the right forelimb 4 and the right hindlimb 5 have the same structure;
[0051] Wherein, the structures of the first joint frame 6, the second joint frame 7, the third joint frame 8 and the fourth joint frame 9 are identical;
[0052] Among them, the 8 steering gears refer to the A steering gear 10A, the B steering gear 10B, the C steering gear 10C, the D steering gear 10D, the E steering gear 10E, the F s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More