

Method for realizing axis information configuration of motion controller based on OPC-UA
A motion controller and information configuration technology, applied in the direction of program control, computer control, general control system, etc., can solve the problem that the embedded motion controller does not have a unified structure, cannot increase or decrease services, etc., to improve the interconnectivity , reduce the difficulty and improve the efficiency of execution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
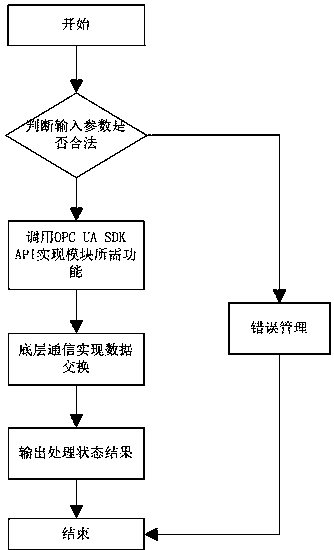
[0021] Such as figure 1 As shown, the present invention provides a method for implementing motion controller axis information configuration based on OPC-UA, including the following steps:
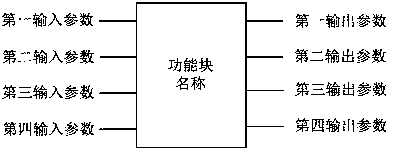
[0022] Step 1, define the module, define the input data processed by the module function as the input parameter of the module, and define the output data processed by the module function as the output parameter;
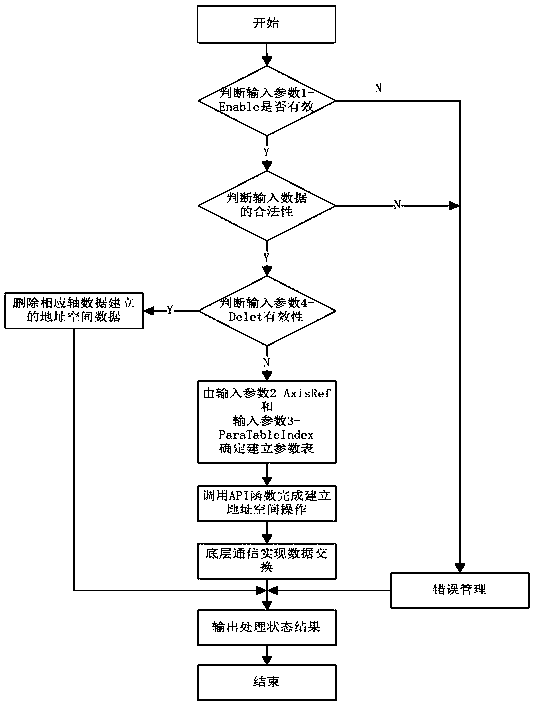
[0023] Step 2, process processing, check the legitimacy of each input parameter, return an error status if there is an error in the input parameter, the modular configuration ends, if the input data is legal, start to encapsulate the module function, and package the completed The function module is transmitted to the embedded platform for data loading, and the module configuration completion result is output.
[0024] Among them, in step 2, the OPC UA SDK API interface function is called to realize the encapsulation when encapsulating the module function; in step 1, when defining...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More