

Magnetic-guiding capsule endoscope system and track planning method
A technology of capsule endoscopy and trajectory planning, applied in the fields of endoscopy, medical science, diagnosis, etc., can solve the problems that the trajectory of capsule endoscopy cannot be determined, it is difficult to apply to the human intestinal tract, and it consumes time for doctors, and it is easy to achieve Effects of control, collision avoidance, and labor reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] The human body model 7 is discretized into a series of points:
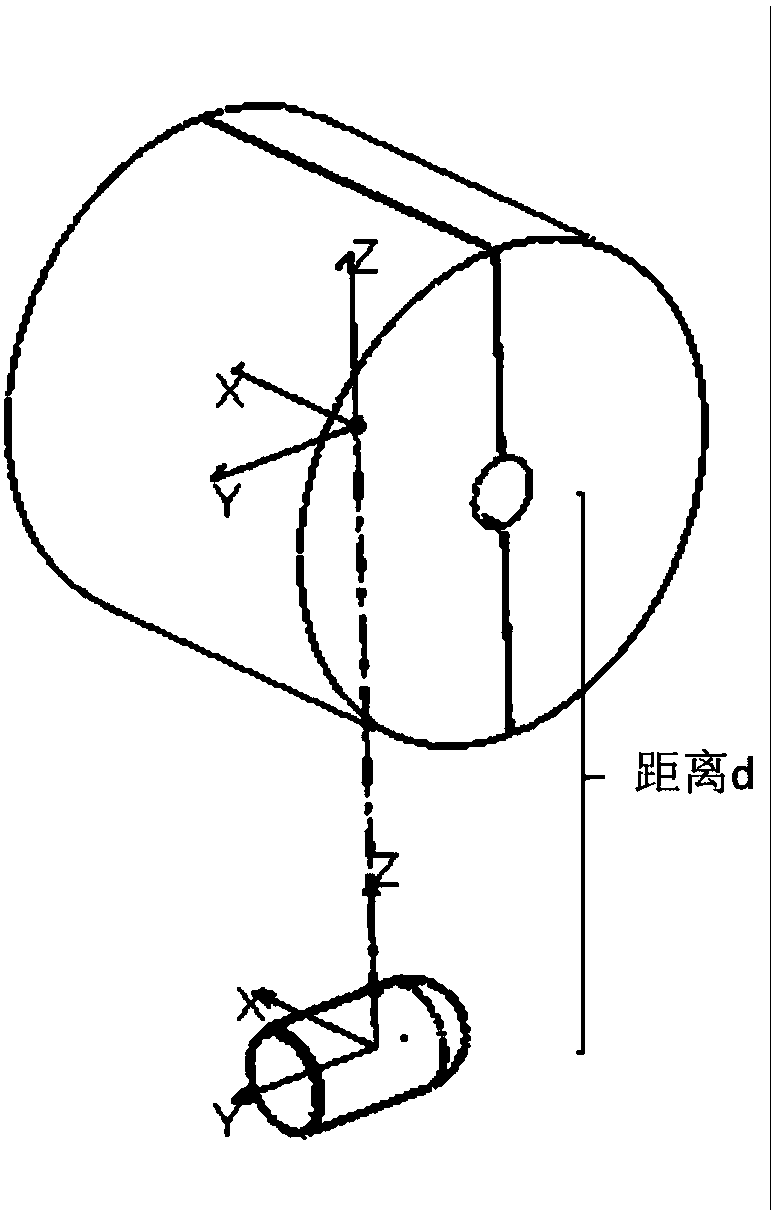
[0049] First determine the partial area of the discretization point model, such as Figure 4 As shown: the current position I9 of the magnetically guided capsule robot 3 is a plane A17 perpendicular to the forward vector 8 of the magnetically guided capsule robot 3, and the forward vector 8 of the magnetically guided capsule robot 3 is perpendicular to the x-axis of the world coordinate system In the plane B19, make two planes A with a distance of a small amount δ from the plane A 1 16. Plane A 2 18. Make two planes B with distance v from plane B19 1 20. Plane B 2 21, Plane A 1 16. Plane A 2 18. Plane B 1 20. Plane B 2 The area surrounded by 21 is the partial area of the discretized model described in step 4.
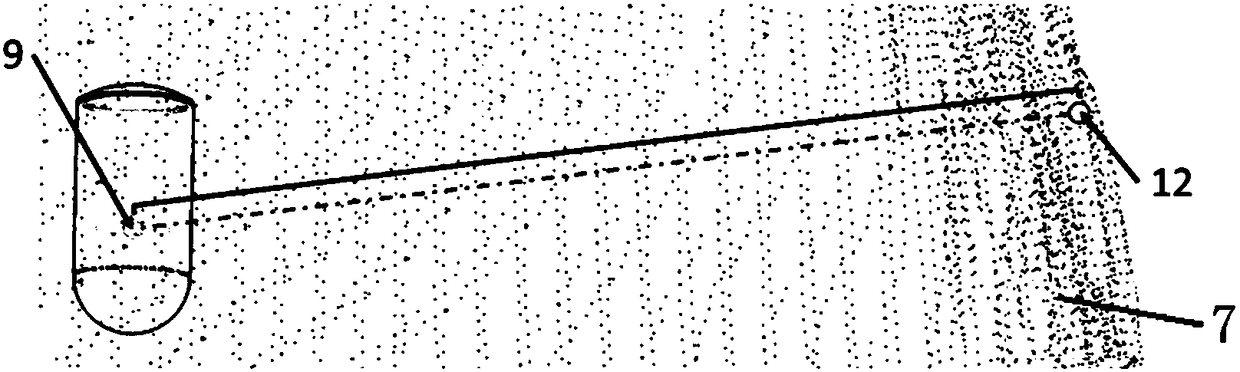
[0050] Then select the direction point 12 of the external guidance magnet on a part of the discretized point model: calculate the distance between the point in the part of the discretize...
Embodiment 2
[0052] The human body model 7 is discretized into a series of points:
[0053] First determine the partial area of the discretization point model: the current position I9 of the magnetically guided capsule robot 3 is defined as the plane A17 perpendicular to the forward vector 8 of the magnetically guided capsule robot 3, and the forward vector 8 of the magnetically guided capsule robot 3 is defined as Plane B19 perpendicular to the x-axis of the world coordinate system, make two planes A with a small distance of δ from plane A17 1 16. Plane A 2 18. Make two planes B with distance v from plane B19 1 20. Plane B 2 21, Plane A 1 16. Plane A 2 18. Plane B 1 20. Plane B 2 The area surrounded by 21 is the partial area of the discretized model described in step 4.
[0054] Then select the direction point 12 of the external guide magnet on the partial area of the discretized point model: calculate the distance between the point in the partial area of the discretized mo...
Embodiment 3
[0056] The human body model 7 is discretized into a series of faces or lines:
[0057] Through the current position I9 of the magnetically guided capsule robot 3, make a plane A17 perpendicular to its forward vector 8. This plane has a series of intersection points with a series of lines of the discrete curve model of the human body obtained before. For the distance between the current positions I9, select and record the obtained shortest distance as L and the corresponding shortest distance point as the direction point 12 of the external guiding magnet.
[0058] The current position I9 of the magnetically guided capsule robot 3 is a plane A17 perpendicular to its forward vector 8, which has a series of intersection lines with a series of surfaces of the previously obtained discrete curved surface model of the human body. The current position I9 of the magnetically guided capsule robot 3 can calculate the distance between all straight lines and the current position I9 of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More