

Wearable inertial device human body gait information acquisition and calculation method
A technology of inertial devices and calculation methods, applied in inertial sensors, instruments, sensors, etc., can solve the problems of large data processing volume, high data cost, and increased joint angle error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
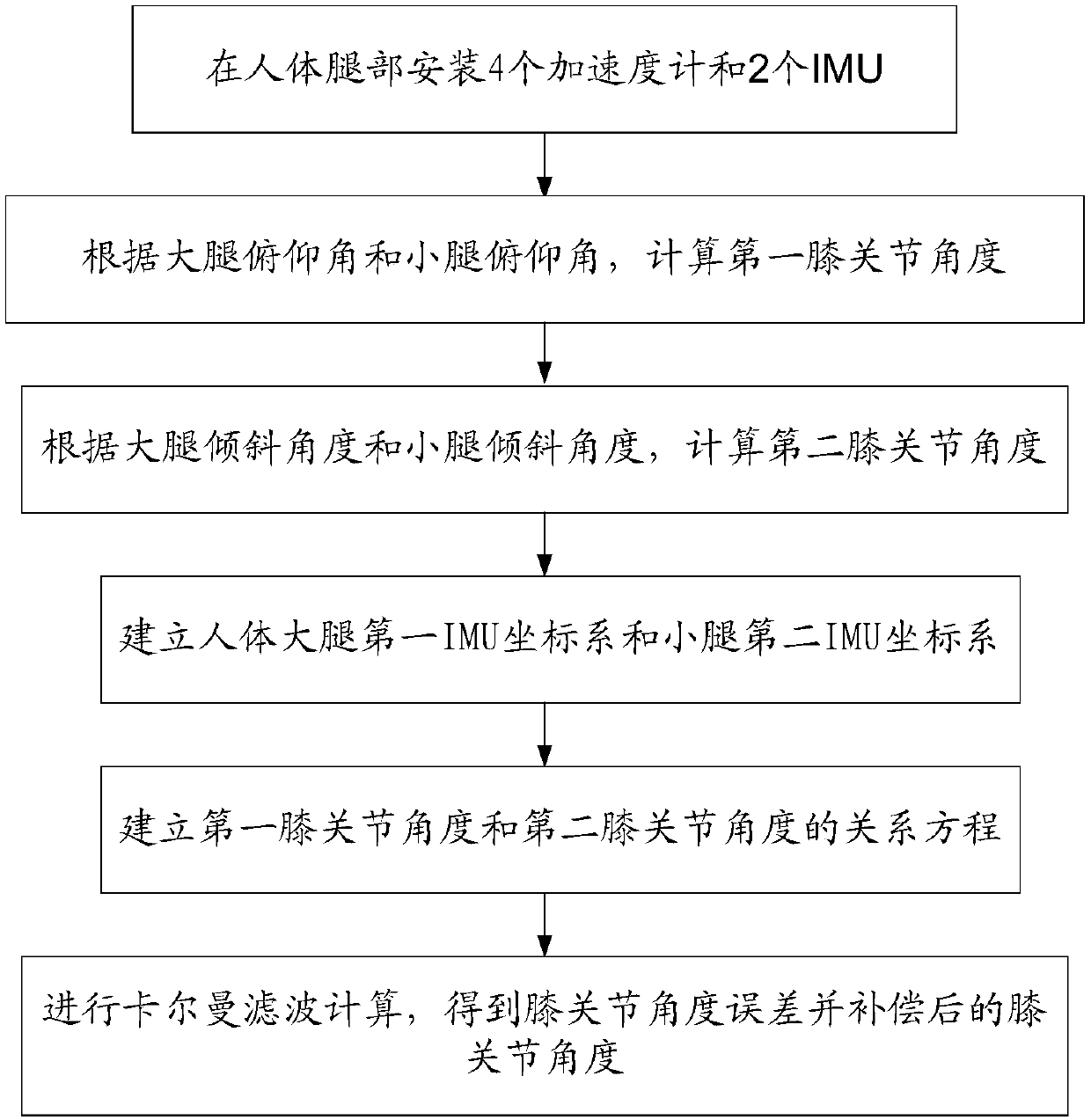
[0081] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0082] The present invention includes 4 accelerometers, each group of two pieces is coaxially arranged on both ends of a strip-shaped steel plate with a length of about 10cm to 20cm, and the installation position of the accelerometer sensor on the steel plate is recorded, and the sensitive axis of the sensor is guaranteed. The direction is parallel to the long side of the steel plate, and the above two strip-shaped steel plates are respectively installed on the outer side of the thigh and calf on the other side of the human body through straps, and the long sides of the two steel plates are respectively parallel to the direction of the large and small leg bones of the human body. And record the distance from the installation position of the thigh plate to the hip joint rotation axis and the distance from the installation position of the calf plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More