

Rotor wing flight mechanical arm system and algorithm based on dynamic gravity center compensation
A rotorcraft and robotic arm technology, applied in the field of rotorcraft manipulator systems and flying robots, can solve problems such as insufficient consideration of the coupling and interference between the robotic arm and the rotorcraft, the lack of stability in the grasping operation, and the inability to complete the grasping, etc. Achieve the effect of improving the efficiency of grasping time, improving the performance of attitude control, and improving the accuracy rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
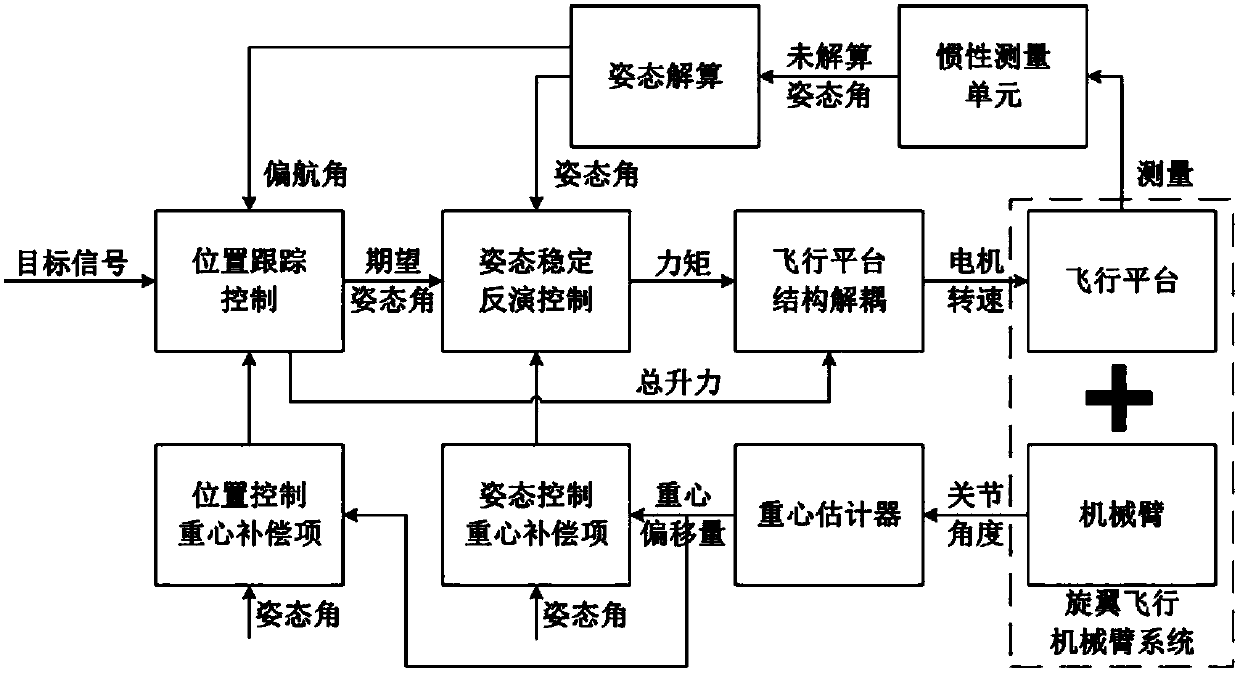
[0053] The attitude control block diagram of a rotor flying manipulator system with dynamic center of gravity compensation algorithm is as follows: image 3 shown, including the following steps:
[0054] (1) Data reading, including the position and attitude information of the rotorcraft and the angles of the joints of the mechanical arm;
[0055] (2) Estimation of the center of gravity of the system;
[0056] Such as image 3 , to estimate the vector r of the center of gravity of the system in the body coordinate system {B} G =[x G ,y G ,z G ] T , each joint angle θ transmitted by the manipulator system to the system controller i , to obtain the coordinate system J of the center of mass of the articulated arm i relative to the articulated arm i i The local coordinates of Respectively represent the joint arm i coordinate system J i The rotation transformation matrix and position coordinates relative to the flight platform coordinate system {B}. The position coordina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More