

IMU-based wheeled robot positioning method
A technology of a wheeled robot and a positioning method, applied in the directions of instruments, measuring devices, surveying and navigation, etc., can solve the problems of unusable, inaccurate, and inability to identify distant objects of odometers and laser scanners, and achieve low manufacturing costs. , the calculation is not large, the effect is easy to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
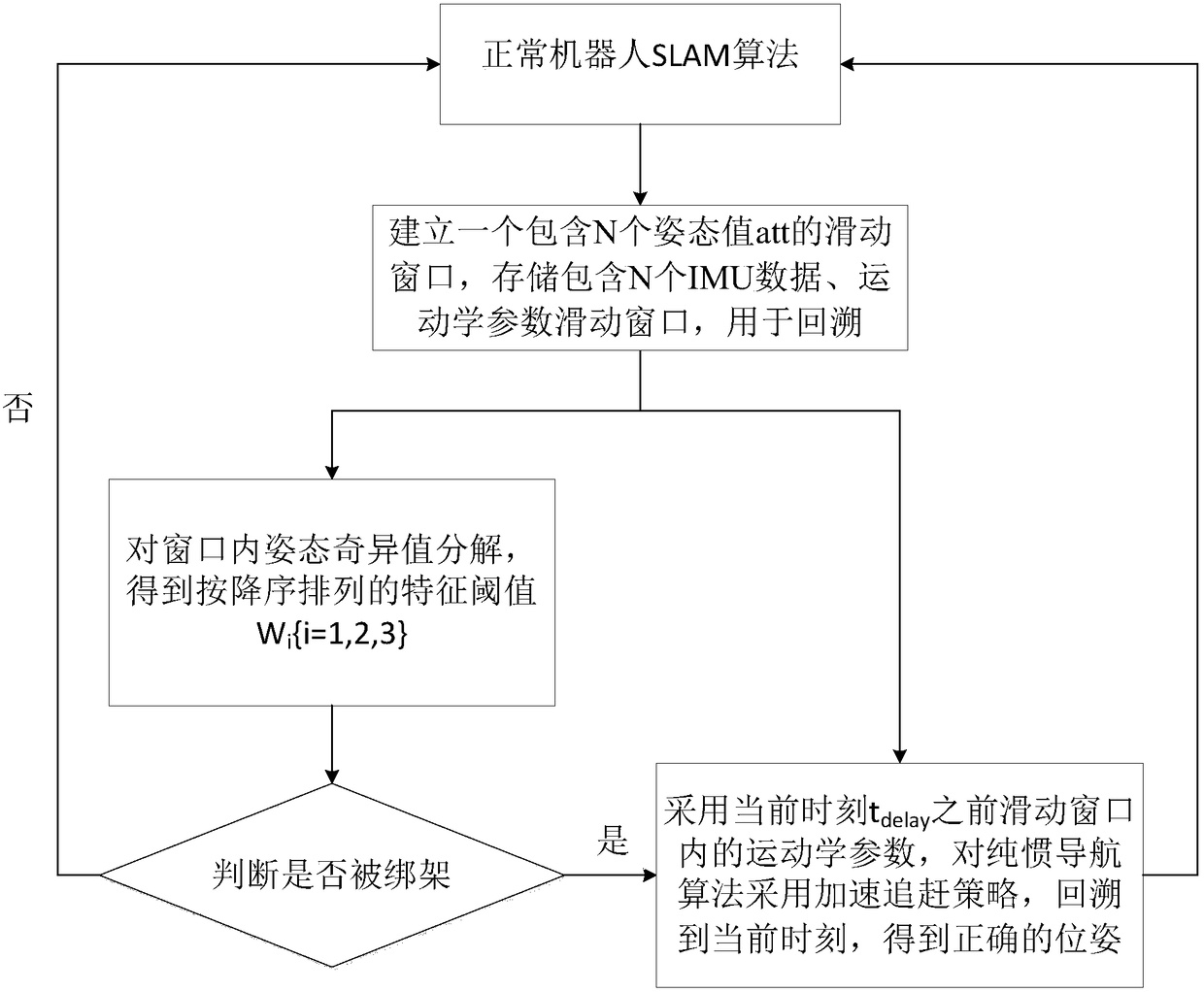
[0016] Embodiment 1: as attached figure 1 As shown, an IMU-based wheeled robot positioning method includes the following steps:
[0017] Step 1: Fusion odometry, 2D laser scanner, IMU data using normal SLAM algorithm;
[0018] Step 2: Create a sliding window containing 30 attitude values att, and store 30 (0.3s) IMU data and sliding windows of kinematic parameters for backtracking;
[0019] Step 3: Singular value decomposition is performed on the attitude values in the sliding window in step 2 to obtain the feature threshold w in descending order i {i=1,2,3};
[0020] Step 4: Obtain the feature threshold w when "kidnapped" according to the test 2 TH 、w 3 TH , to judge whether the robot is "kidnapped": if w 2 >w 2 TH ,w 3 >w 3 TH , then it is determined that "kidnapping" occurs, and then proceed to step 5; if no "kidnapping" occurs, directly return to continue to execute the normal SLAM algorithm in step 1;
[0021] Step 5: A delay t will occur due to the judgm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More