Metamorphic hand design method based on metamorphic principle
A design method and principle technology, applied in the direction of calculation, manipulator, electric digital data processing, etc., can solve the problems of large grasping error, long production cycle, lower grasping efficiency and system reliability, etc., achieve high added value, make up for Effects of robot errors, improved gripping efficiency, and system reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
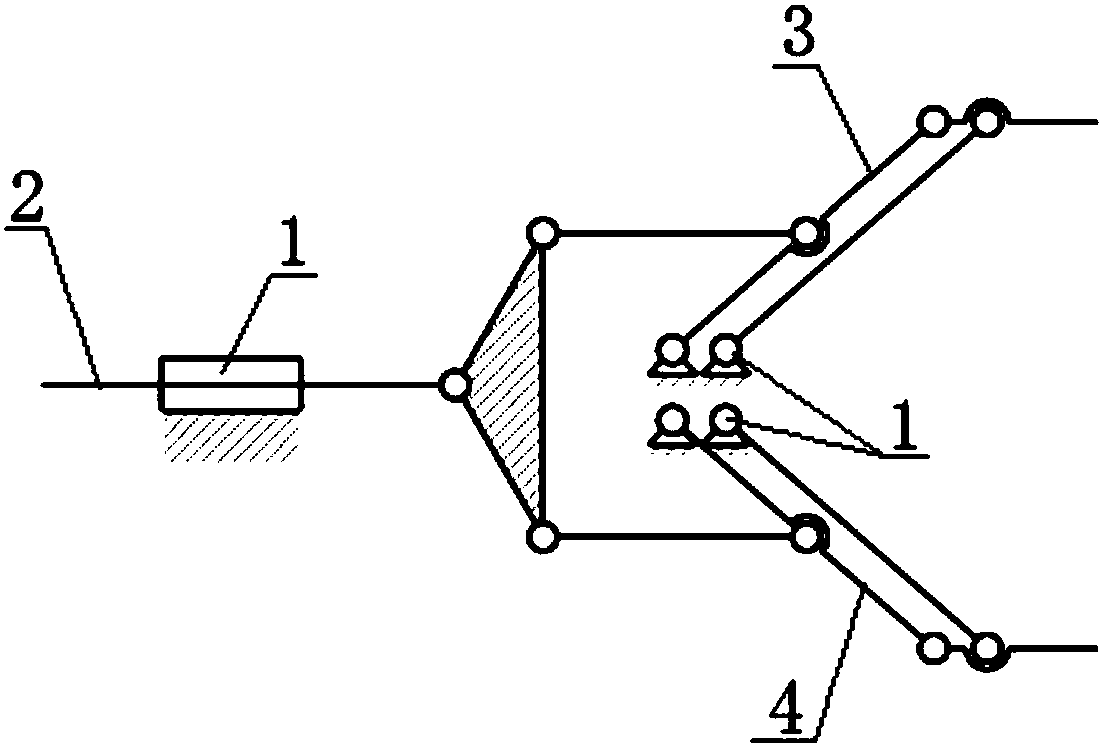
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
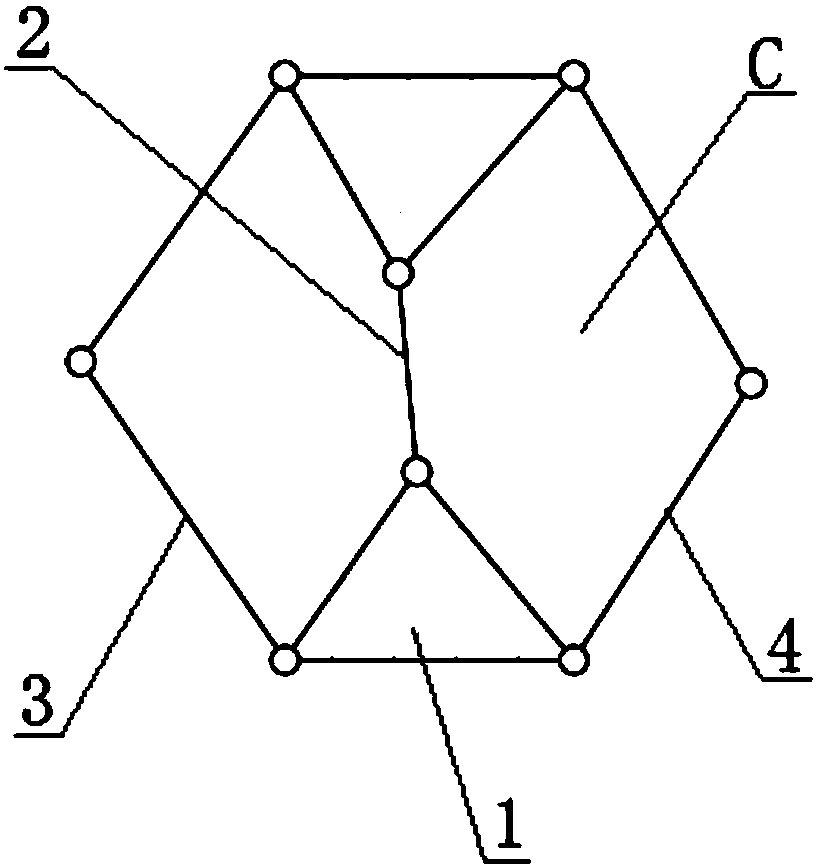
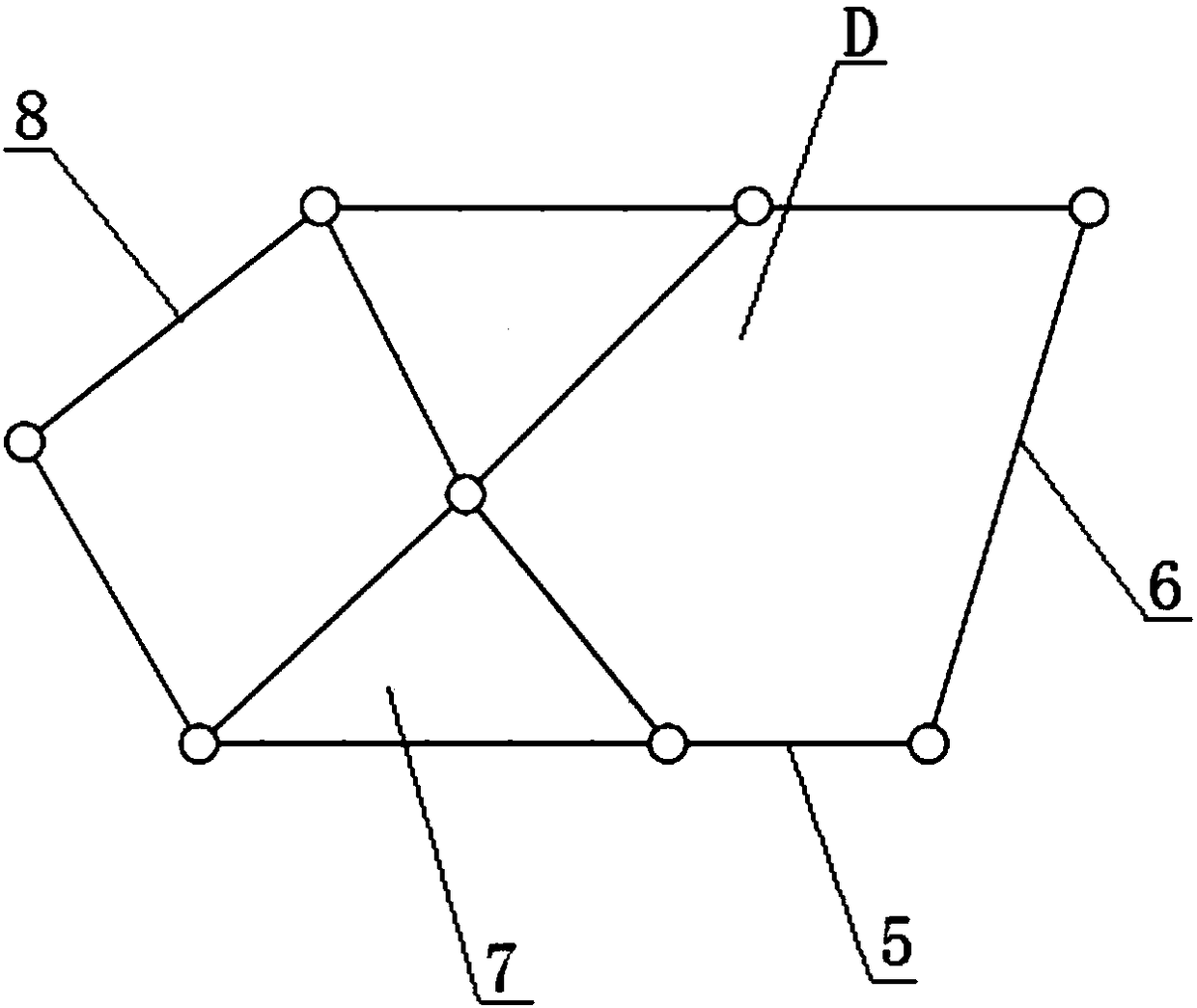
[0029] A method for designing a metamorphic hand based on the metamorphic principle, comprising the following steps:
[0030] A) Set the number of components in the kinematic chain as N and the number of kinematic pairs as J, then the degree of freedom F of the kinematic chain satisfies the following formula:
[0031] F=3(N-1)-2J
[0032] In addition, the number of loops L of the kinematic chain satisfies the following formula:
[0033] L=1+J-N
[0034] Therefore:
[0035]
[0036] In the formula, the number of components N, the degree of freedom F, and the loop L are all integers. When the degree of freedom F is determined, the combination of the number of components N, the number of kinematic pairs J, and the loop L is calculated:
[0037]
[0038] In the formula, p is the element number of the component, N p Indicates th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More