

Panorama camera lens position estimation method and panorama camera
A panoramic camera and attitude estimation technology, applied in the field of image processing, can solve problems such as poor accuracy, and achieve the effects of improved accuracy, improved accuracy, and improved stitching effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
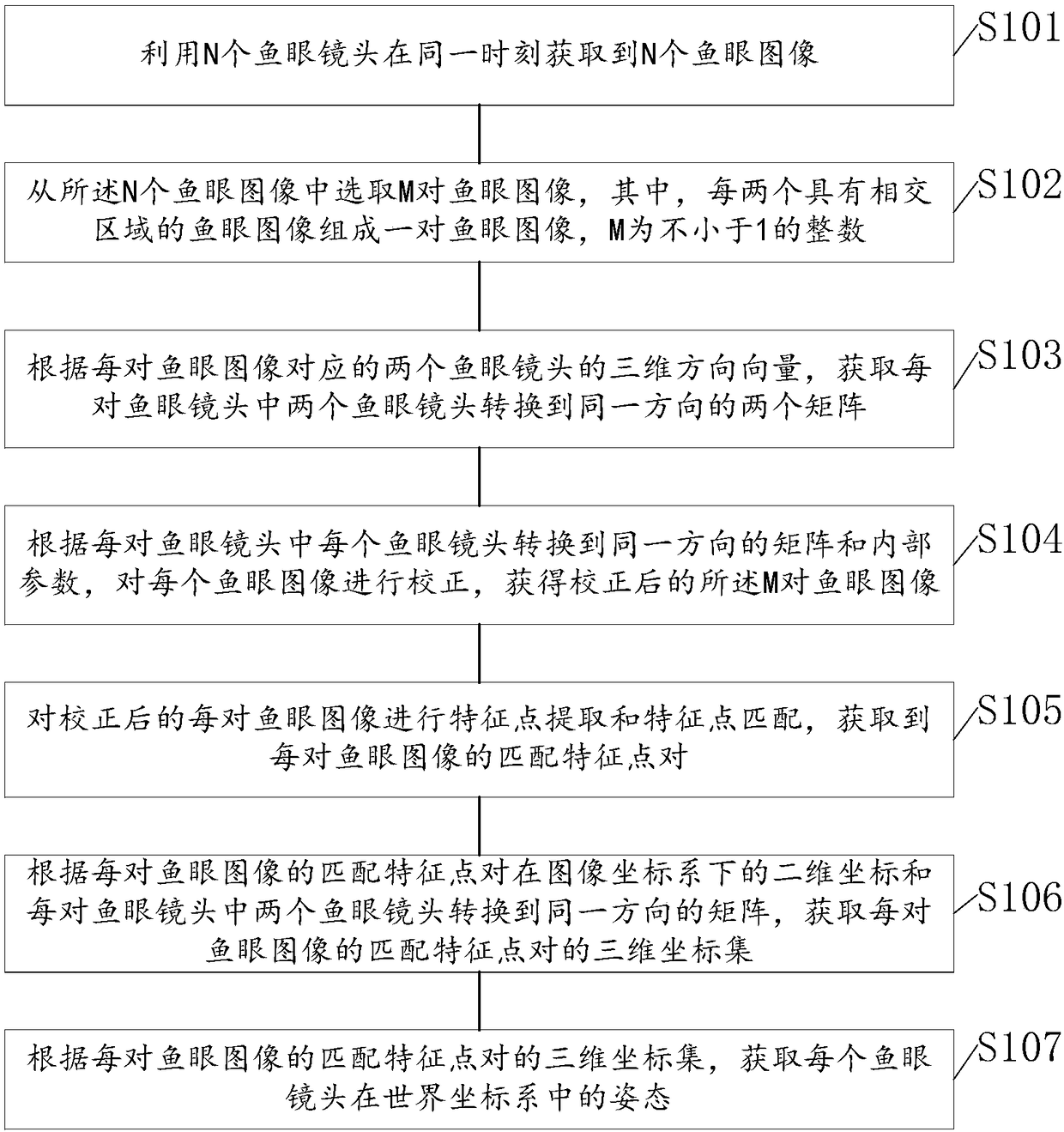
[0055] The first aspect of the present invention provides a method for estimating the pose of a panoramic camera lens, such as figure 1 As shown, the panoramic camera has N fisheye lenses, and N is an integer not less than 2, and the method includes:
[0056] S101, using N fisheye lenses to acquire N fisheye images at the same time;
[0057] S102. Select M pairs of fisheye images from the N fisheye images, wherein every two fisheye images with intersecting areas form a pair of fisheye images, and M is an integer not less than 1;
[0058] S103. According to the three-dimensional direction vectors of the two fisheye lenses corresponding to each pair of fisheye images, obtain two matrices for converting the two fisheye lenses in each pair of fisheye lenses to the same direction;
[0059] S104. Correct each fisheye image according to the matrix and internal parameters of each fisheye lens in each pair of fisheye lenses converted to the same direction, and obtain the corrected M p...
Embodiment 2
[0140] The second aspect of the present invention provides a panoramic image stitching method applied in a panoramic camera, the panoramic camera has N fisheye lenses, and N is an integer not less than 2, such as Figure 5 As shown, the method includes:
[0141] S501. Calculate the pose of each fisheye lens in the world coordinate system by using the method provided in the first aspect of the application, and store it in the memory;
[0142] S502. After using N fisheye lenses to acquire N fisheye images at the same time, according to the posture of each fisheye lens in the world coordinate system stored in the memory, the N fisheye images, each Intrinsic parameters of the fisheye lenses, and the N fisheye images are stitched into a panoramic image.
[0143] Wherein, the specific implementation steps of step S501 can refer to the implementation steps recorded in the first aspect of the present invention. It can be seen that the method provided by the first aspect of the presen...
Embodiment 3
[0165] The third aspect of the present invention provides a panoramic camera with N fisheye lenses, where N is an integer not less than 2, such as Figure 6 As shown, the panoramic camera also includes:
[0166] A fisheye image acquisition unit 601, configured to acquire N fisheye images at the same time using the N fisheye lenses;
[0167] An image pair selection unit 602, configured to select M pairs of fisheye images from the N fisheye images, wherein every two fisheye images with intersecting regions form a pair of fisheye images, and M is an integer not less than 1 ;
[0168] The image conversion unit 603 is used to obtain two matrices in which the two fisheye lenses in each pair of fisheye lenses are converted to the same direction according to the three-dimensional direction vectors of the two fisheye lenses corresponding to each pair of fisheye images;
[0169] The image correction unit 604 is used to correct each fisheye image according to the matrix and internal pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More