

Rotor position angle compensation method of motor vector control
A technology of rotor position and vector control, which is applied in vector control system, motor generator control, electronic commutation motor control, etc. It can solve the problems that the motor control performance cannot be improved well, and there are large errors, so as to improve the current The effect of controlling precision and enhancing dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings.
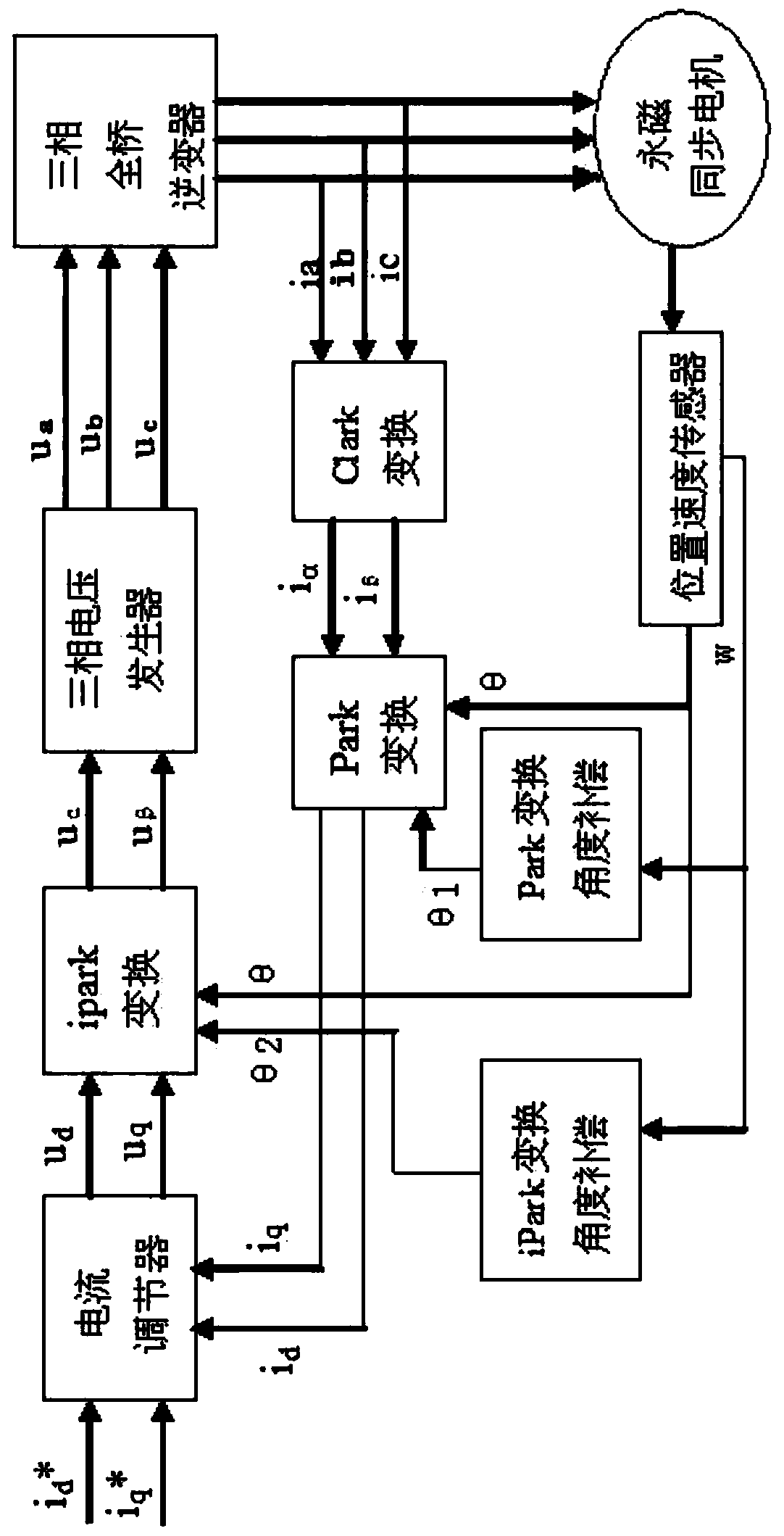
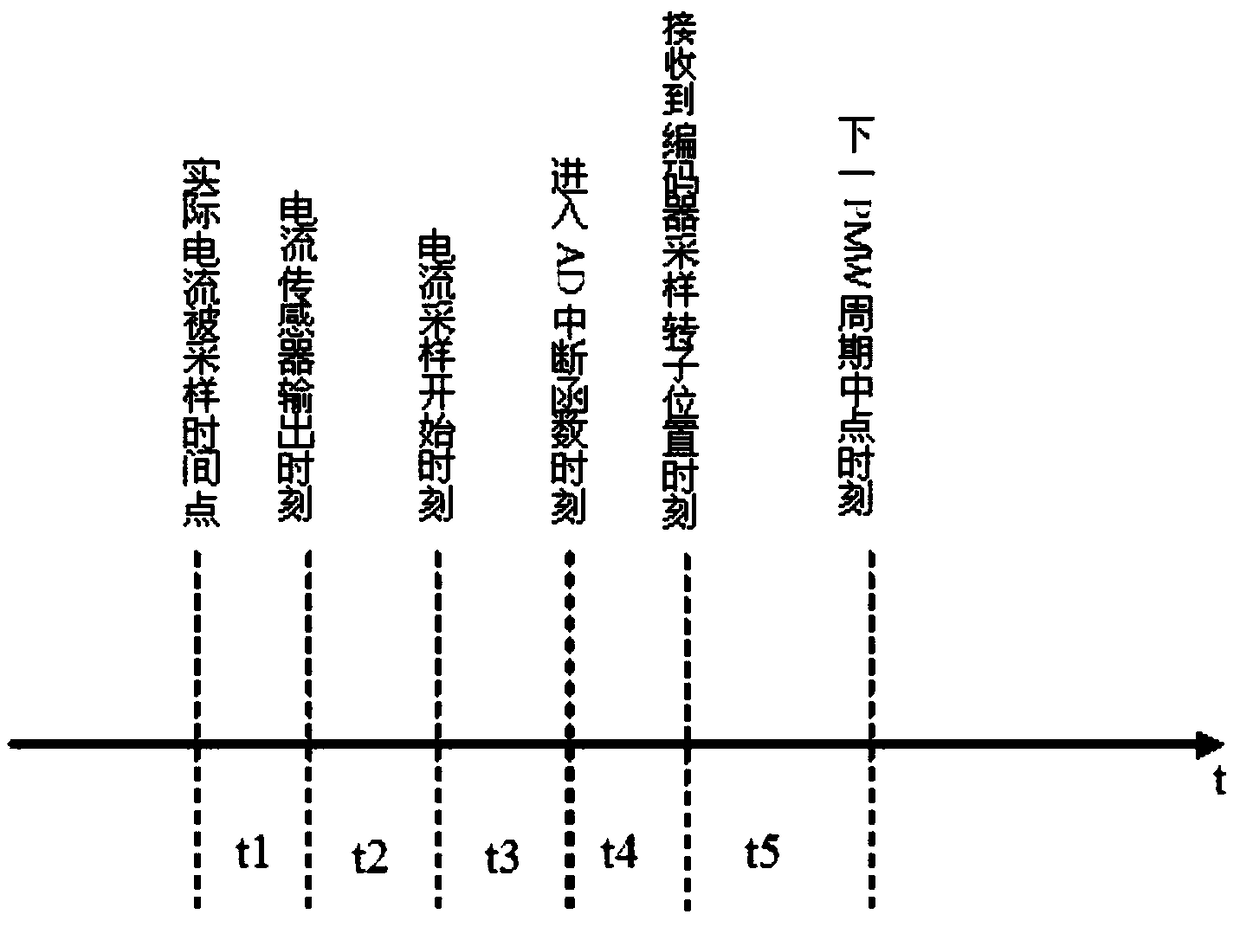
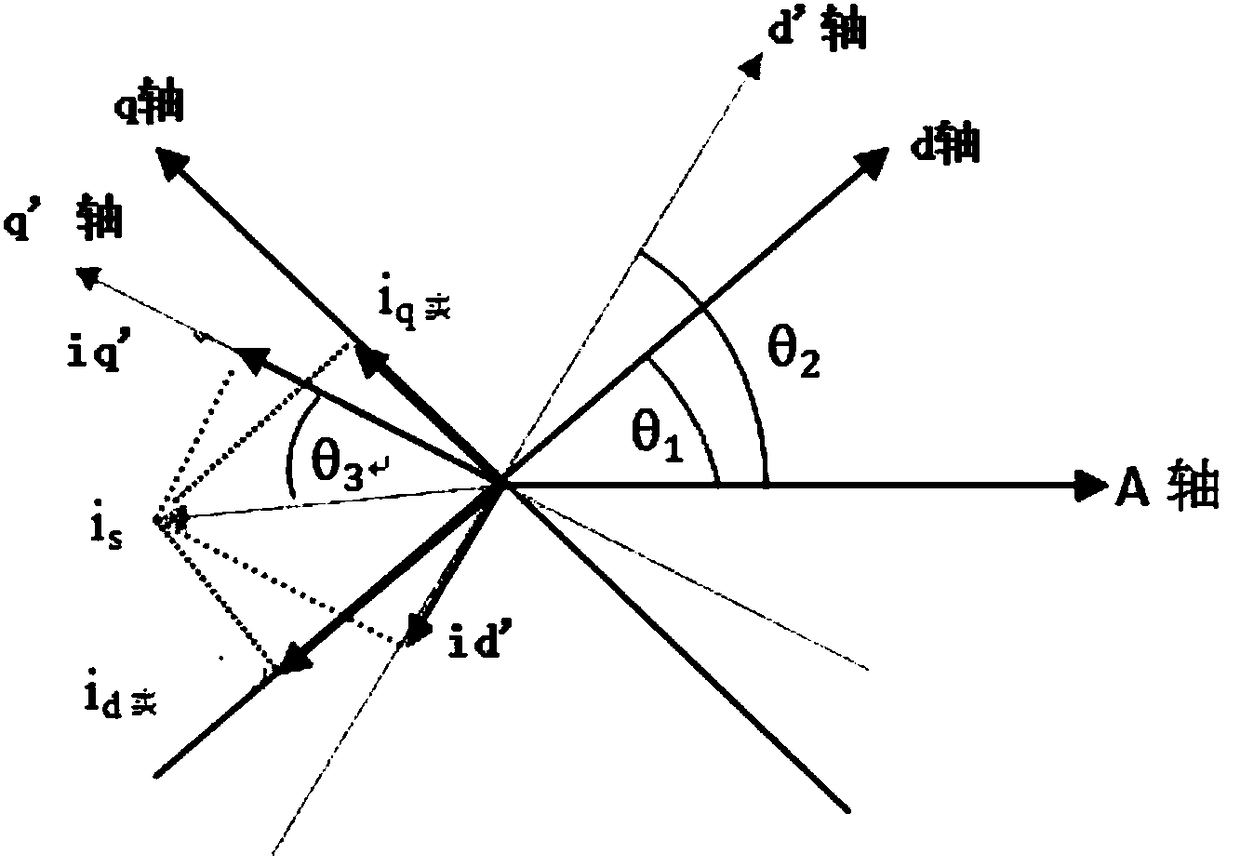
[0015] A rotor position angle compensation method for motor vector control according to an embodiment of the present invention, wherein, in motor vector control, the controller compensates the rotor position angle θ sampled by the rotor position detection device, and according to the compensated rotor position Angle θ' to α-axis feedback current i α and β-axis feedback current i β Perform Park transformation to obtain the actual d-axis current i of the motor d and q-axis actual current i q , where, θ'=θ-θ1, θ1=w*(t1+t2+t3+t4), θ1 is the Park transformation compensation angle, w is the motor operating frequency, t1 is the delay time of the current sensor used to sample the stator current , t2 is the delay time of the filter circuit for filtering the output signal of the current sensor, t3 is the time between the start of sampling the stator current by the AD peripher...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More