Closed-loop control system for rehabilitation robot
A rehabilitation robot and closed-loop control technology, applied in passive exercise equipment, medical science, physical therapy, etc., can solve the problems of patients with limb loss, insufficient completion, and inability to accurately reach 60°, so as to improve accuracy and avoid Damage, the effect of guaranteeing completion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0032] The present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
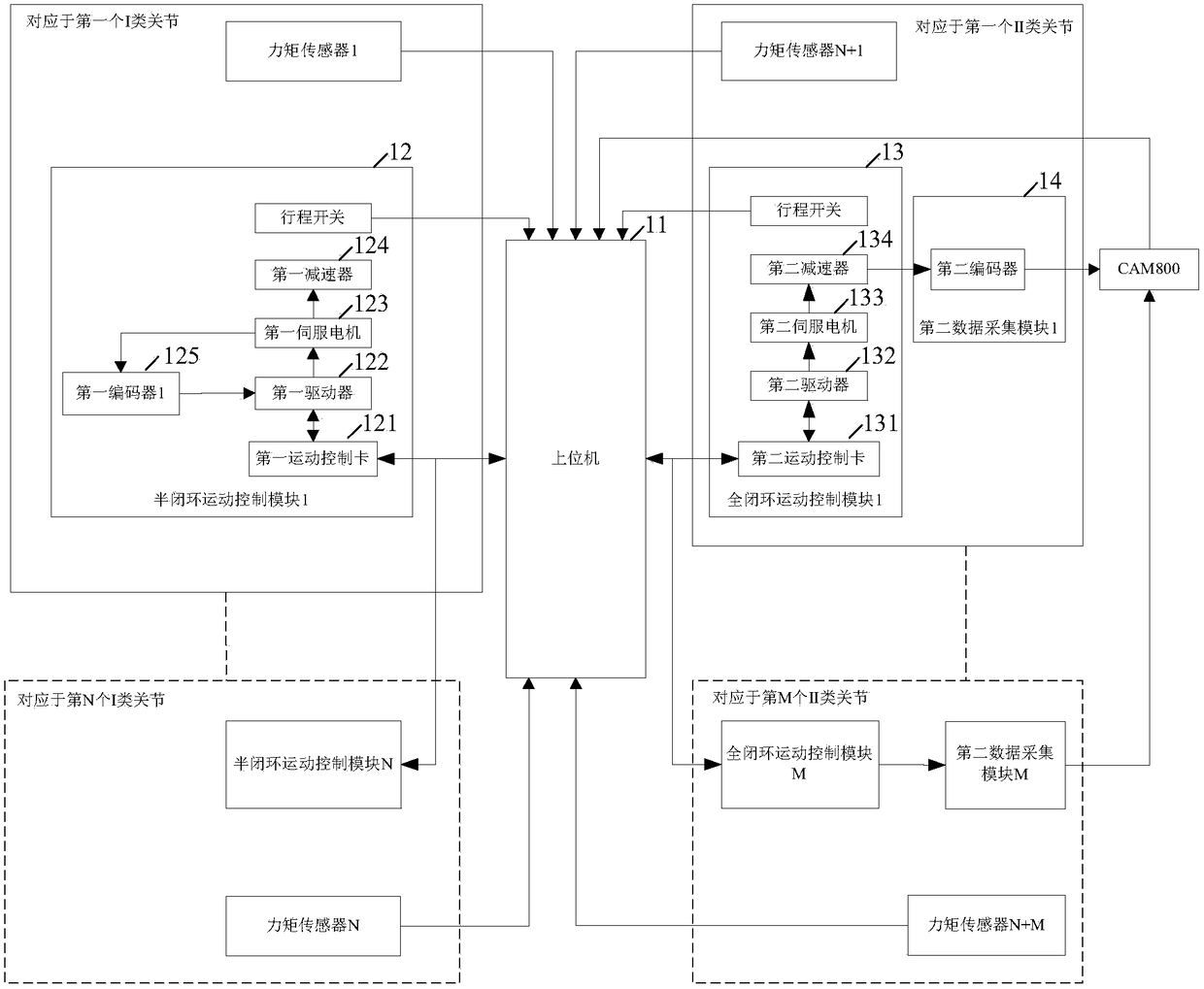
[0033] see figure 1 , is a functional block diagram of an embodiment of the closed-loop control system of the rehabilitation robot of the present invention. In order to help patients with rehabilitation training, for each part of the patient that needs rehabilitation training, the corresponding joints are set against the joints of the human body, and are divided into Type I joints and Type II joints according to the above classification, that is, each rehabilitation robot includes multiple Type I joints and multiple joints. Class II joints, and then control the movement of each joint through the closed-loop control system. Specifically, in this embodiment, the closed-loop control system includes a host computer 11, and N one-to-one correspondence with a plurality of Type I joints (so that the rehabilitation robot has N Type I joints, N is greate...
Embodiment 2
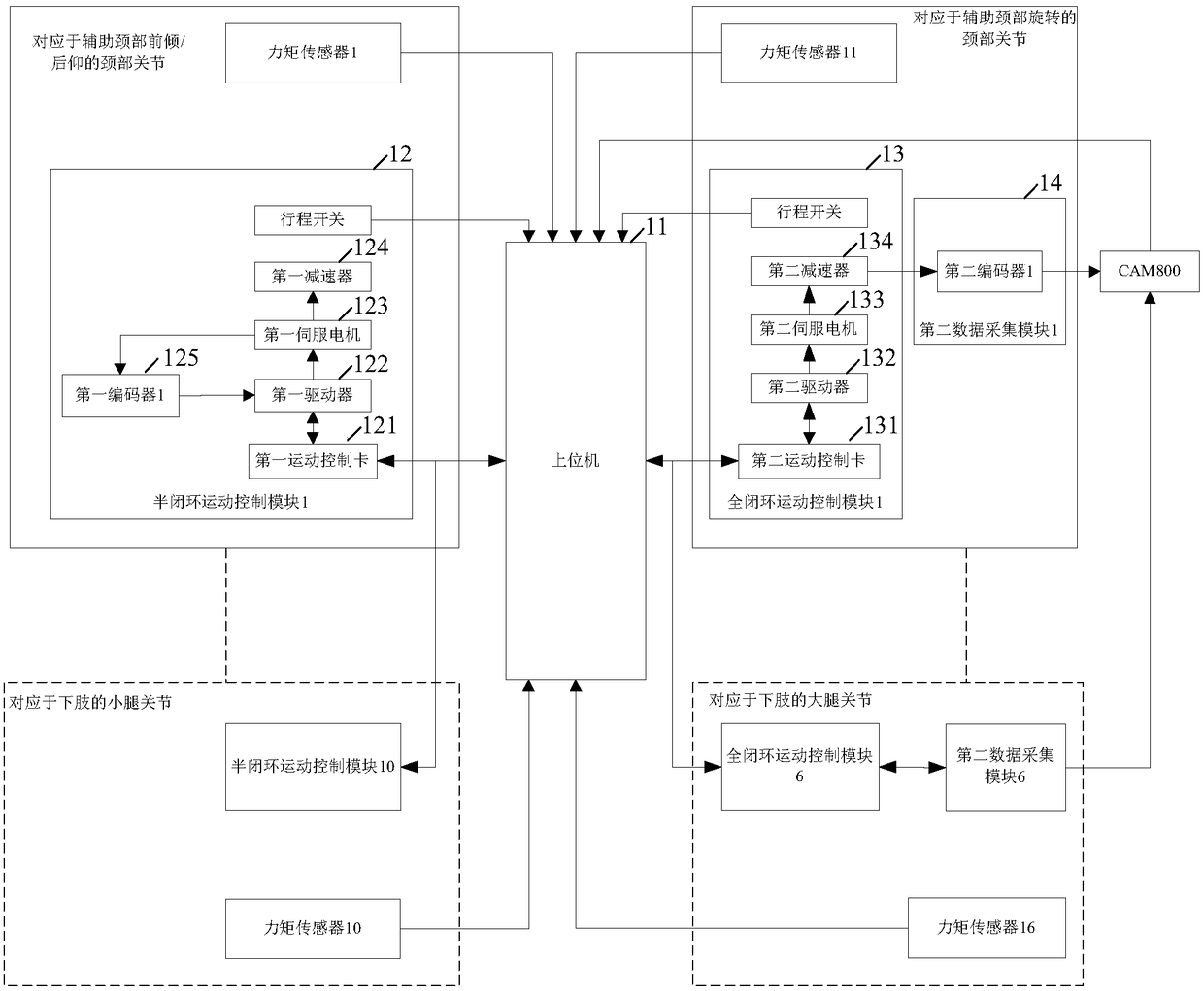
[0054] see figure 2 , is a functional block diagram of an embodiment of the closed-loop control system of the rehabilitation robot of the present invention. The rehabilitation robot corresponding to the closed-loop control system of the present invention includes sixteen joints, among which ten joints are Type I joints, which are respectively: the neck joint that assists the neck to lean forward / back, and the joint that assists the waist to lean forward / back The supine lumbar joints, the upper arm joints and wrist joints of the two upper limbs, and the thigh joints and ankle joints of the two lower limbs; the six joints are Class II joints, namely: the neck joint that assists in neck rotation, and the joint that assists in lumbar rotation The lumbar joints, the forearm joints of the two upper limbs, and the calf joints of the two lower limbs.
[0055] see figure 2 , the closed-loop control system in the present embodiment includes a host computer 11 (the same module adopts...
Embodiment 3
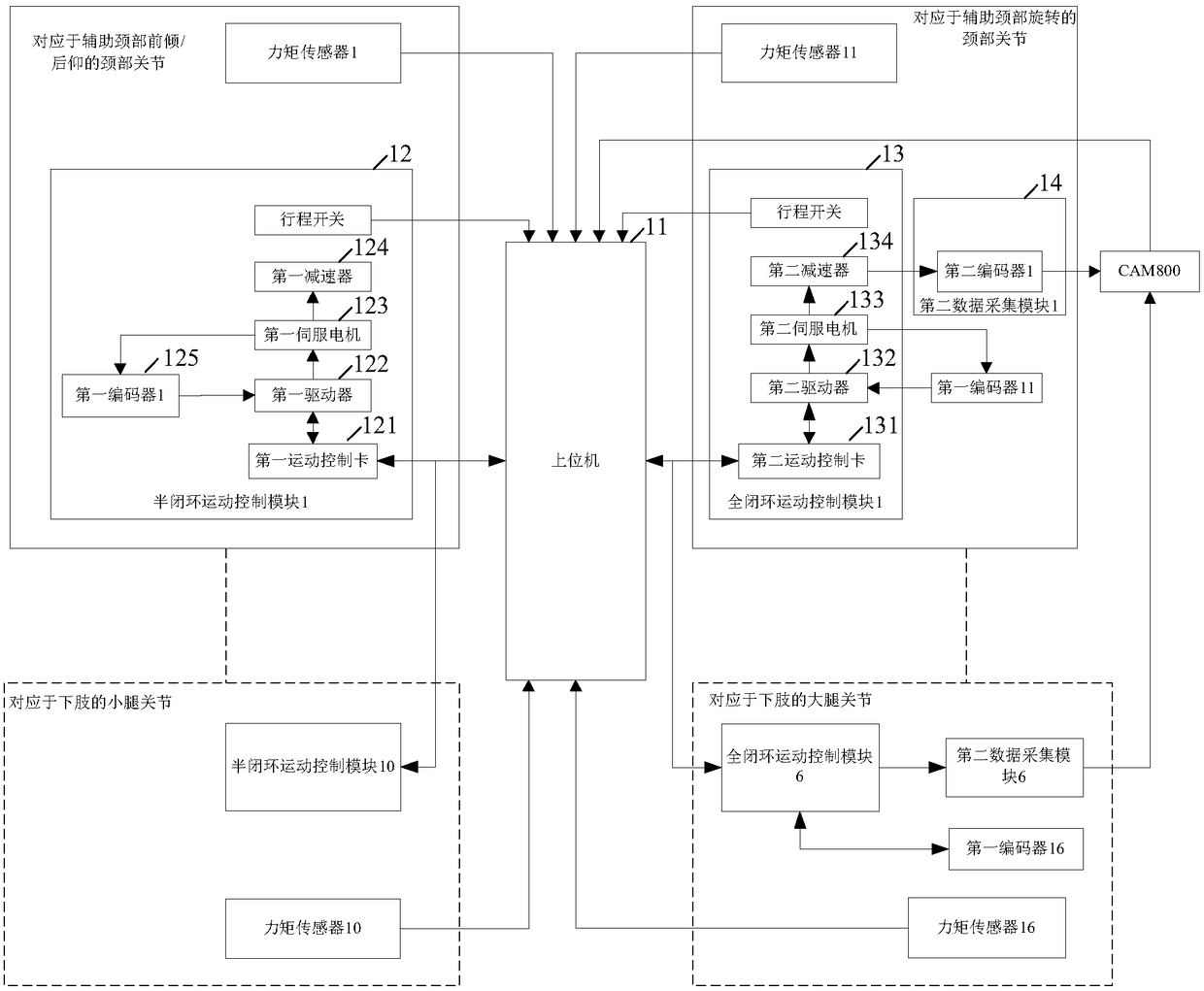
[0076] The present invention also provides a closed-loop control system of a rehabilitation robot, see image 3 , the closed-loop control system in this embodiment includes the various modules in the above-mentioned embodiment 1 or embodiment 2, the same modules use the same reference numerals, and their working principles are the same, and will not be repeated here. The difference is that this embodiment In an example, each full-closed-loop control module 13 in the closed-loop control system is also connected to a first encoder, and the first encoder is connected in the same manner as the first encoder in the semi-closed-loop motion control module 12, that is, the The first encoder is arranged on the input shaft of the second servo motor 133 of the full-closed-loop motion control module 13 , and the output end of the first encoder is directly connected to the second driver 132 of the full-closed-loop motion control module 13 . And when the host computer simultaneously receive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com