

Multi-rotor flight-path planning system and method orienting to inspection of power transmission lines
A technology for track planning and power transmission lines, applied in radio wave measurement systems, satellite radio beacon positioning systems, control/regulation systems, etc., can solve poor positioning accuracy, does not consider the terrain characteristics of power transmission lines, geographic elevation tower coordinates, Issues such as autonomous online adjustment of the control strategy of the UAV are not considered to achieve the effect of avoiding collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
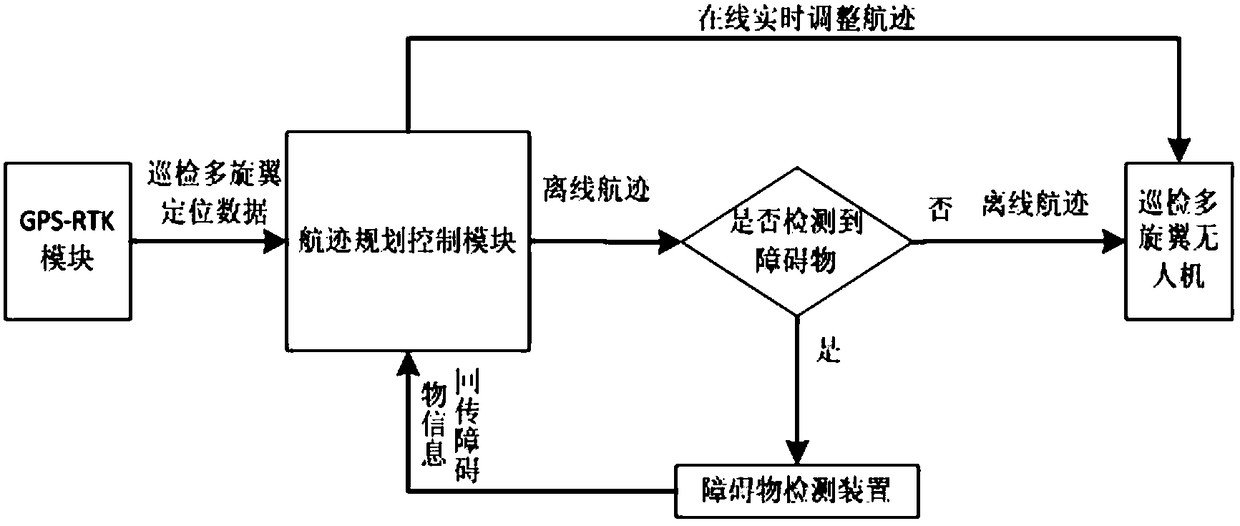
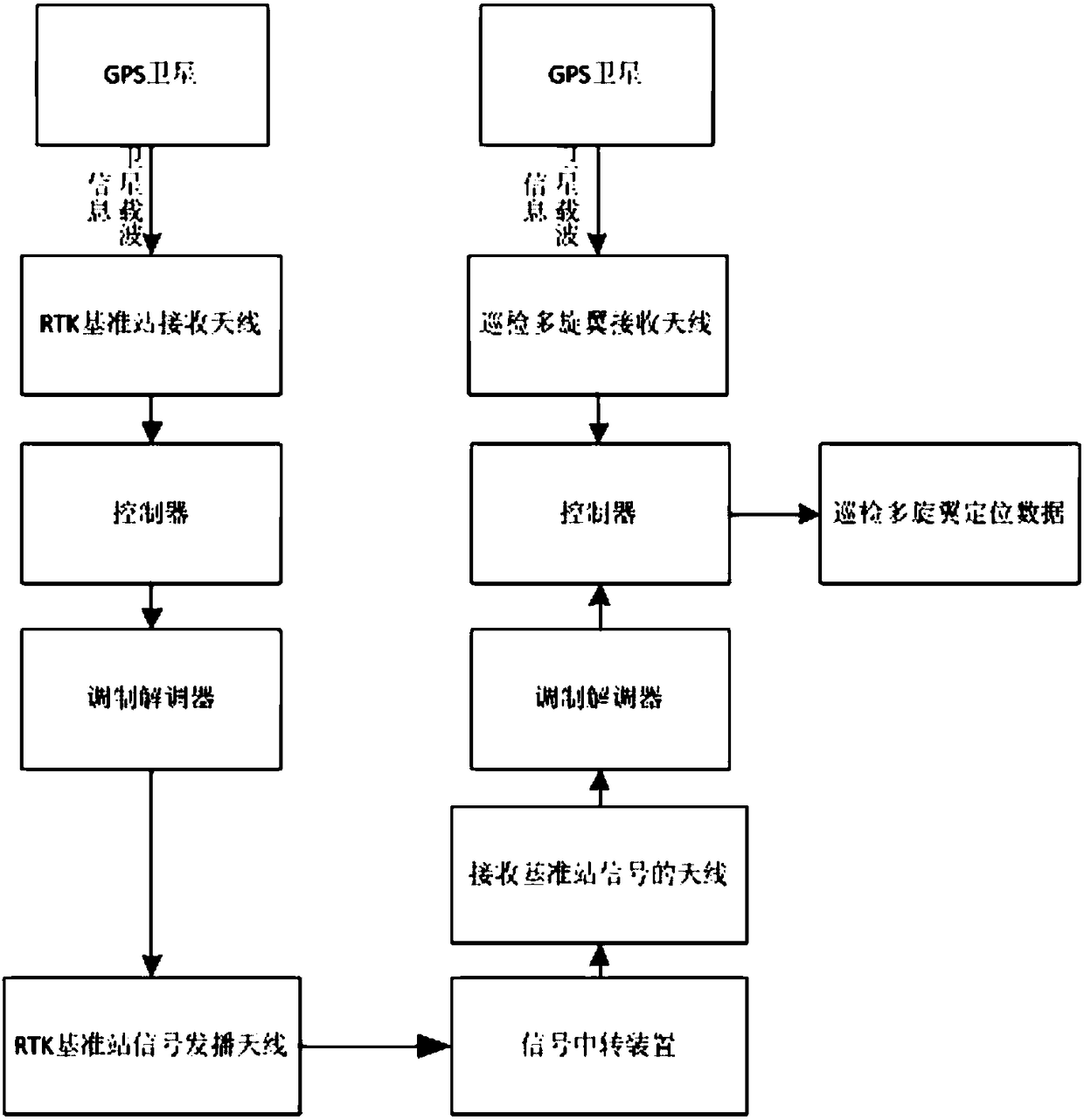
[0045] Example: such as Figure 1-Figure 3 As shown, a multi-rotor trajectory planning system for transmission line inspection, including GPS-RTK module, obstacle detection module, inspection multi-rotor UAV and trajectory planning control module, GPS-RTK module includes differential GPS The positioning system and RTK base station, the differential GPS positioning system uses two GPS receivers, which are used as the base station and the mobile station of the UAV respectively. The base station is installed on the field, and the mobile station is installed on the UAV. The GPS-RTK module is used to obtain To inspect the position of the UAV, the trajectory planning control module obtains the UAV position of the GPS-RTK module and the obstacle information detected by the obstacle detection module, and combines the geographic information to use the offline trajectory planning module and online adjustment trajectory The planning module performs offline track planning and online track...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More