

Human organ epidermis adsorber for surgical robot
A technology of surgical robots and human organs, applied in the field of medical devices, can solve problems such as improper operation, secondary damage to the skin of organs, etc., and achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
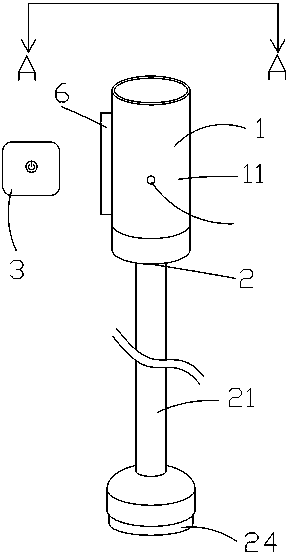
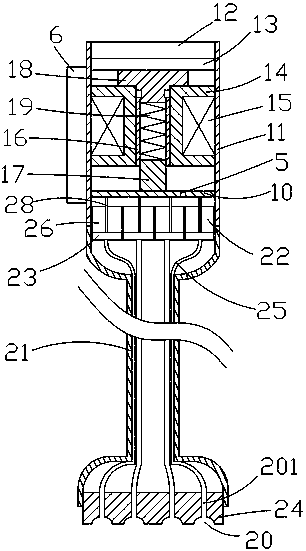
[0031] The human organ epidermal absorber for surgical robots includes a driving part 1 and an absorbing part 2. The driving part 1 includes a cylinder body 11, a battery 12, a circuit board 13, a coil support 14 arranged in the cylinder body 11, and coils wound around the body 11. The electromagnetic coil 15 on the support 14, the sleeve pipe 16 assembled in the center of the coil support 14, the movable iron core 17 that can move up and down in the sleeve pipe 16, and the static iron core 18 fixed on the upper end of the sleeve pipe 16, the static iron core 18 and the movable iron core A spring 19 is arranged between the iron cores 17. The moving iron core is treated by vacuum, annealing, and other special processes, which breaks through the limit of traditional materials and greatly enhances the electromagnetic performance of the moving iron core. One end of the spring 19 is connected with the static iron core 18, and the other is One end is connected and matched with the mo...
Embodiment 2
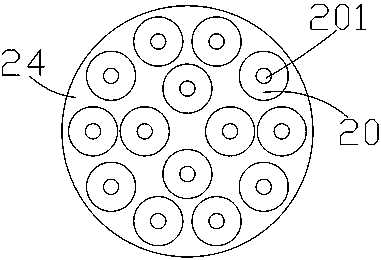
[0041] There are N negative pressure chambers, N piston cylinders, N is a natural number, N≥2, and the number of negative pressure chambers 20, air pipes 25 and piston cylinders 26 are the same.
[0042] The parts not described are the same as in Example 1.
[0043] Working principle and operation method of the present invention:
[0044] When the electromagnetic coil is not energized, the moving iron core and the pull plate move to the lower limit under the action of the spring, and the piston is at the bottom of the piston cylinder at the same time. The electromagnetic coil is a device that uses the principle of electromagnetic induction to work. The device controls the power on or off of the electromagnetic coil through the circuit board. The adsorption principle of the present invention is the principle of negative pressure adsorption. When the suction cup cover is attached to the skin surface of the operation site, press the switch on the controller to energize the electr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More