

Method for controlling attitude angle of three-degree-of-freedom parallel mechanism based on kinematics normalization
A control method and kinematics technology, applied in non-electric variable control, control without feedback, position/direction control, etc., can solve the problems of real-time and low precision of attitude control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
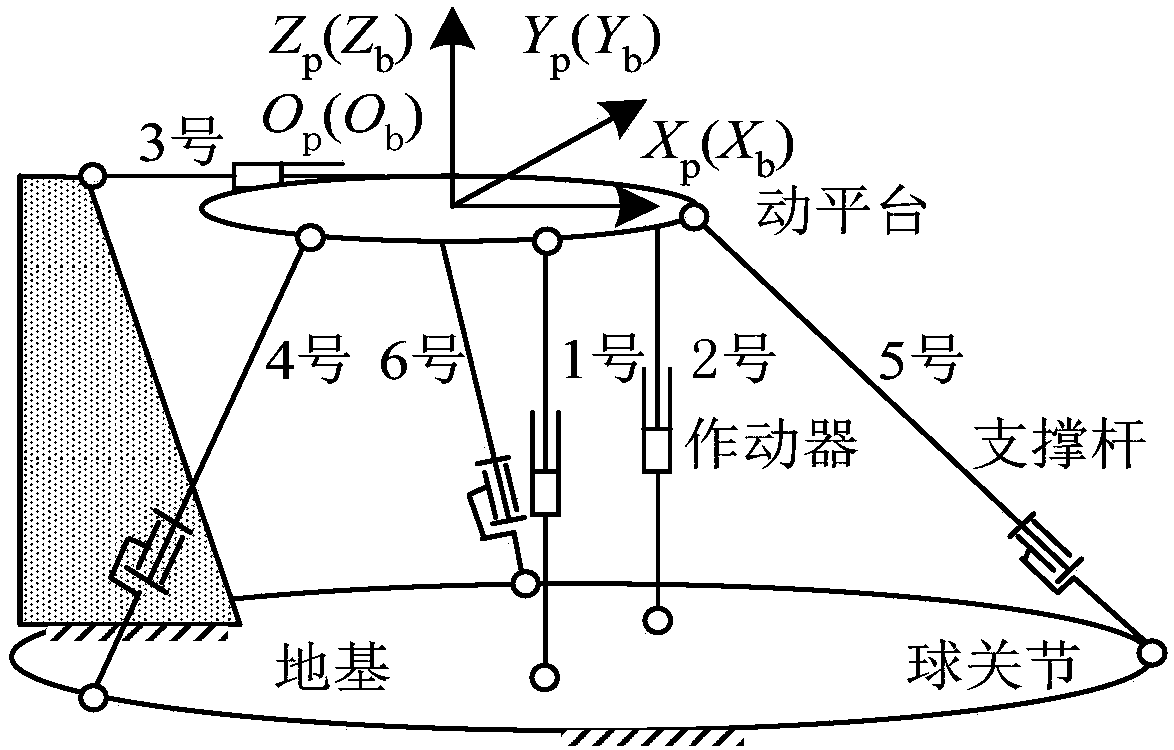
[0079] In the embodiment, the parallel mechanism includes three sets of actuators, three sets of support rods and a moving platform, one end of the three sets of actuators is respectively hinged to the moving platform, and the other ends of the three sets of actuators are respectively hinged to the foundation or the support rods; One end of the three sets of support rods is respectively hinged to the foundation, and the other ends of the three sets of actuators are respectively hinged to the moving platform or the actuator;
[0080] When the parallel mechanism is in the initial working position: the actuator, the support rod and the upper hinge point of the moving platform are in the same plane and located on a circle; the three support rods have the same length and are located on a circle with the lower hinge point of the foundation The center of the circle where the upper and lower hinge points are located is the vertical projection of the center of the moving platform on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More