

Four-degree-of-freedom ankle joint rehabilitation robot capable of assisting training
A technology for rehabilitation robots and ankle joints, applied in the direction of current-using instruments, artificial respiration, and positioning for physiotherapy, etc., can solve problems such as inability to achieve rehabilitation effects, reduce joint movement ability, and large volume of rehabilitation devices, and achieve increased rehabilitation effects and comfort, reduce the risk of secondary injury, and improve the effect of rehabilitation training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described below in conjunction with specific embodiment:
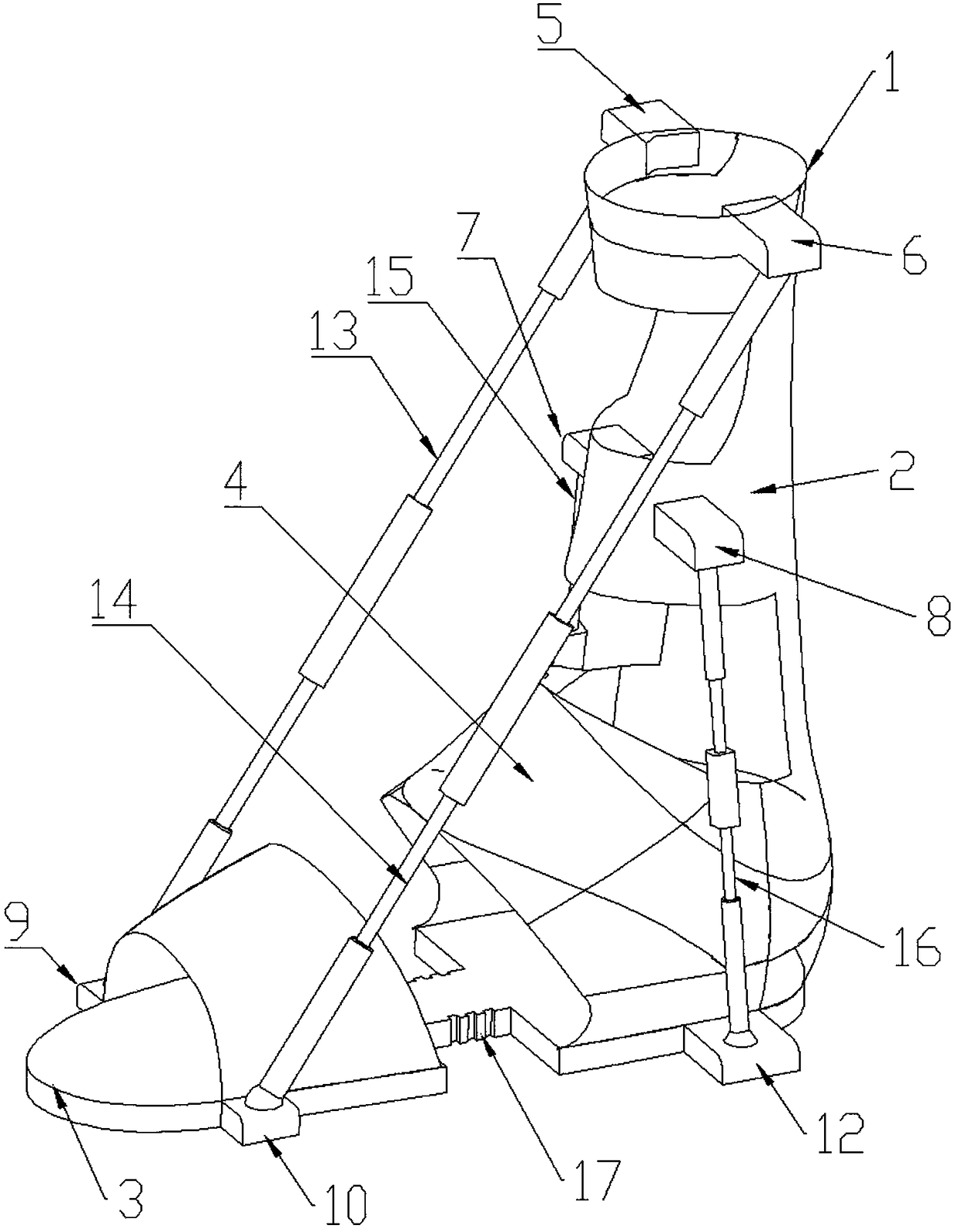
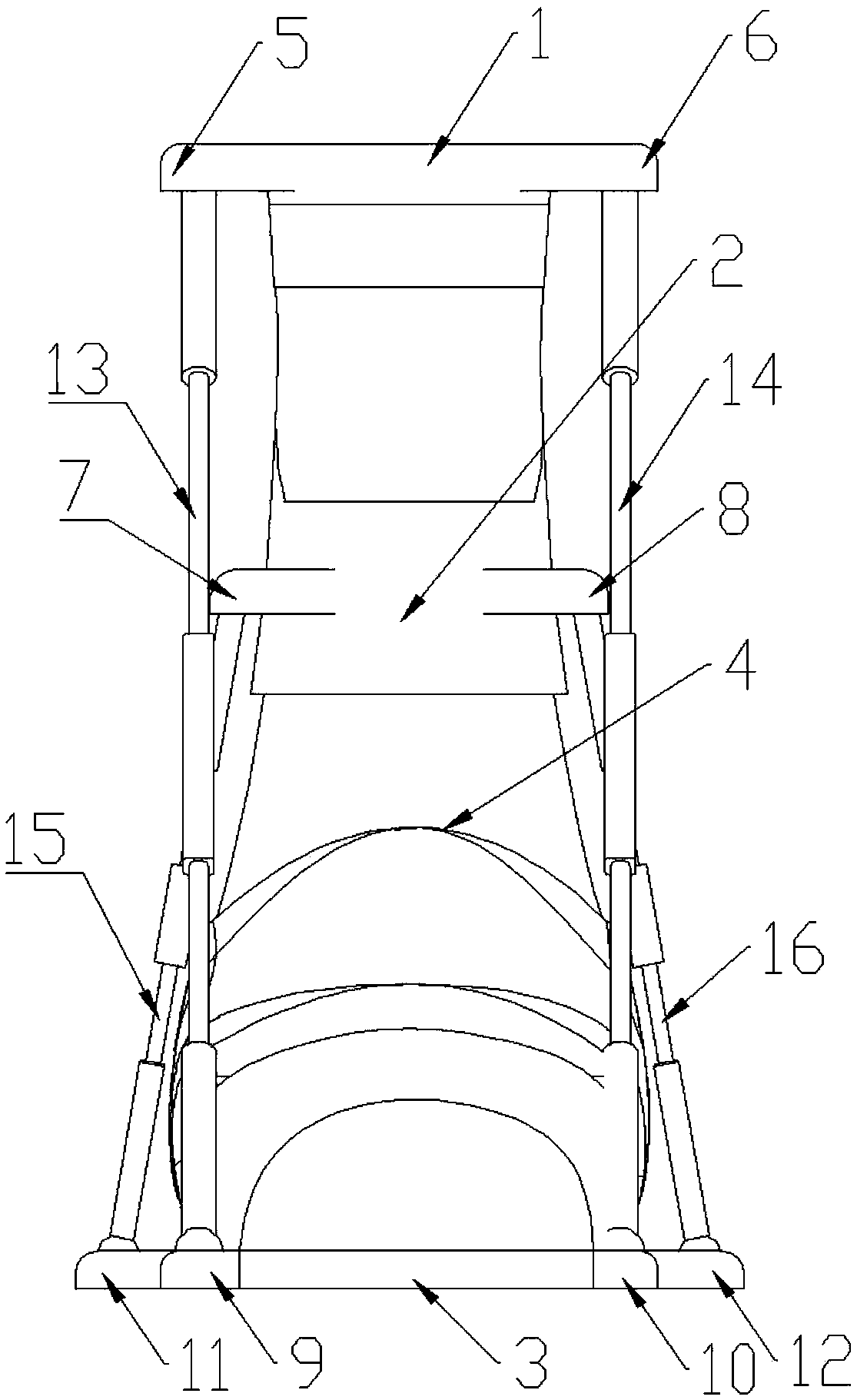
[0025] A four-degree-of-freedom auxiliary training ankle joint rehabilitation robot, which includes a lower leg fixed sleeve 1, a lower leg fixed sleeve 2 and a rigid sole 3, the lower leg fixed sleeve 1, lower leg fixed sleeve 2 and Between the rigid soles 3 is connected a binding structure 4 of soft material covering the calf, ankle joint and instep, and the first upper connecting piece 5 and the second upper connecting member 5 are respectively provided on both sides of the upper fixing sleeve 1 of the lower leg. Connecting piece 6, the first lower connecting piece 7 and the second lower connecting piece 8 are respectively provided on both sides of the lower leg fixing sleeve 2, the first front connecting piece 9 and the second lower connecting piece are respectively provided on both sides of the front end of the rigid sole 3 Two front connectors 10, the first rear connector 11 and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More