

Multi-source information fusion method based on factor graph
A technology of multi-source information fusion and factor graph, applied in the field of multi-source information fusion and all-source navigation based on factor graph, can solve the problems of time asynchrony, signal delay, unavailability, etc., achieve less processing and improve navigation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
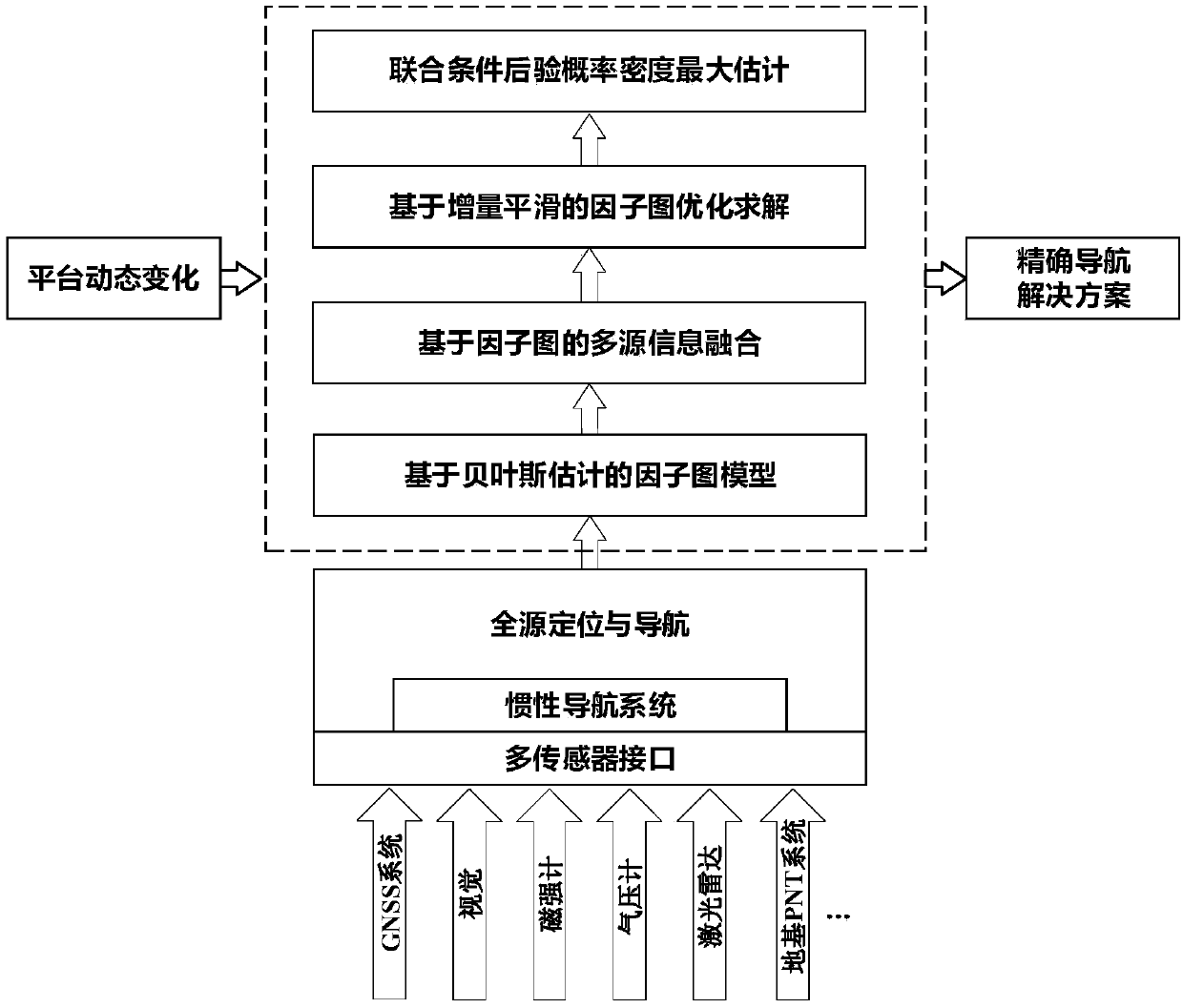
[0042] Embodiment 1: as figure 1 As shown, a multi-source information fusion method based on factor graph, this program uses the factor graph method to solve the problem of multi-source information fusion in complex environments, with IMU as the core and other sensors as auxiliary navigation. It involves seven types of sensors, including IMU, GNSS, vision, magnetometer, lidar, ground-based PNT, and barometer, to simulate the existence of multiple sensors with different frequencies, asynchronous or time delays, and use available sensors anytime and anywhere to make the carrier meet Complicated environmental changes and different tasks require that multi-sensor plug-and-play is realized; the specific implementation steps are as follows:
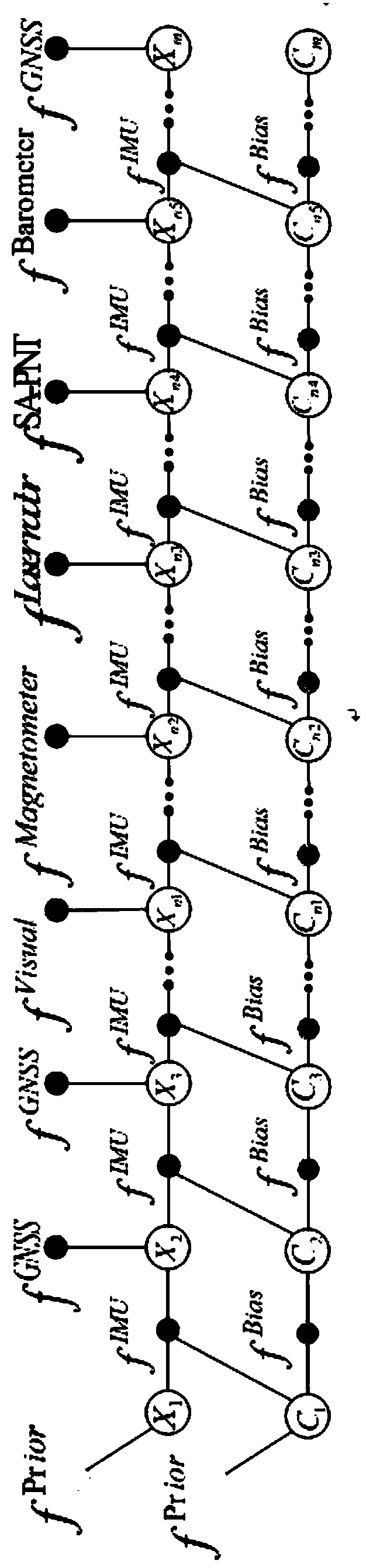
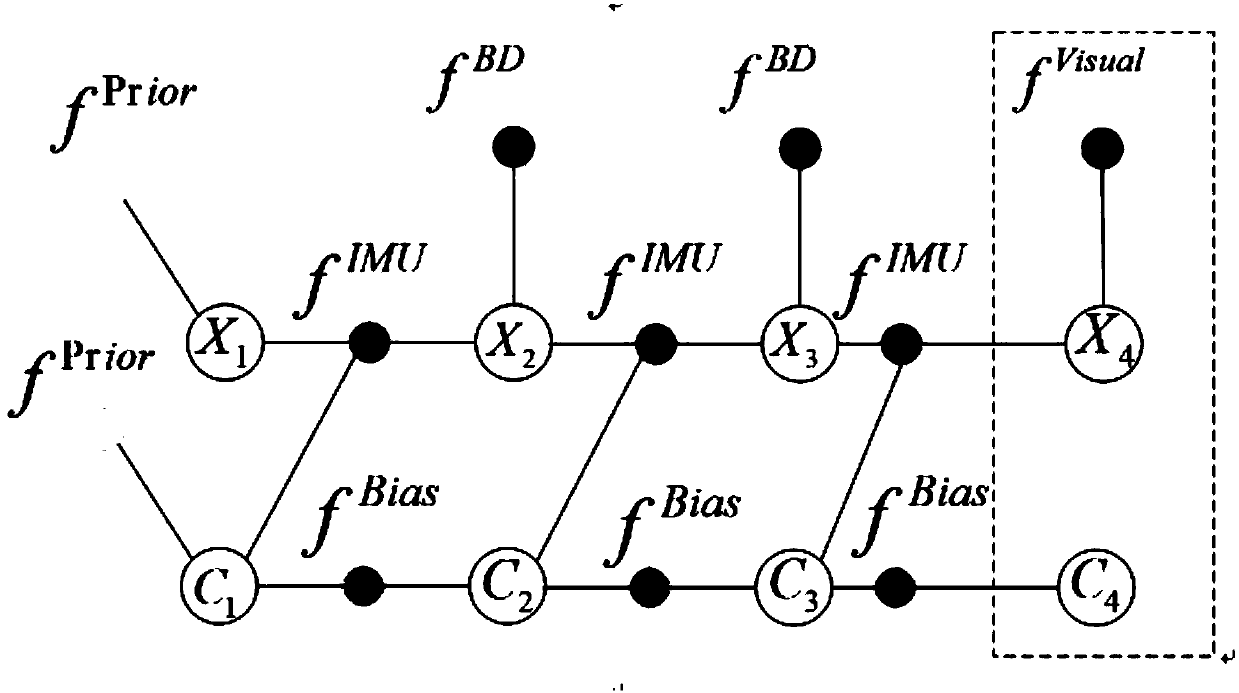
[0043] (1) Establish a factor graph model based on Bayesian estimation,
[0044] In the factor diagram, the state equations of the IMU and its calibration parameters are defined as:
[0045]
[0046] C k+1 =g(C k )(2); where X k Indicat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More