

Improved chaos ant colony algorithm-based unmanned aerial vehicle airway planning method
An ant colony algorithm and route planning technology, applied in the direction of navigation calculation tools, etc., can solve problems such as failure to meet operational needs, planning failure, excessive pheromone accumulation, etc., to improve algorithm search efficiency, improve search accuracy, and shorten search space Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
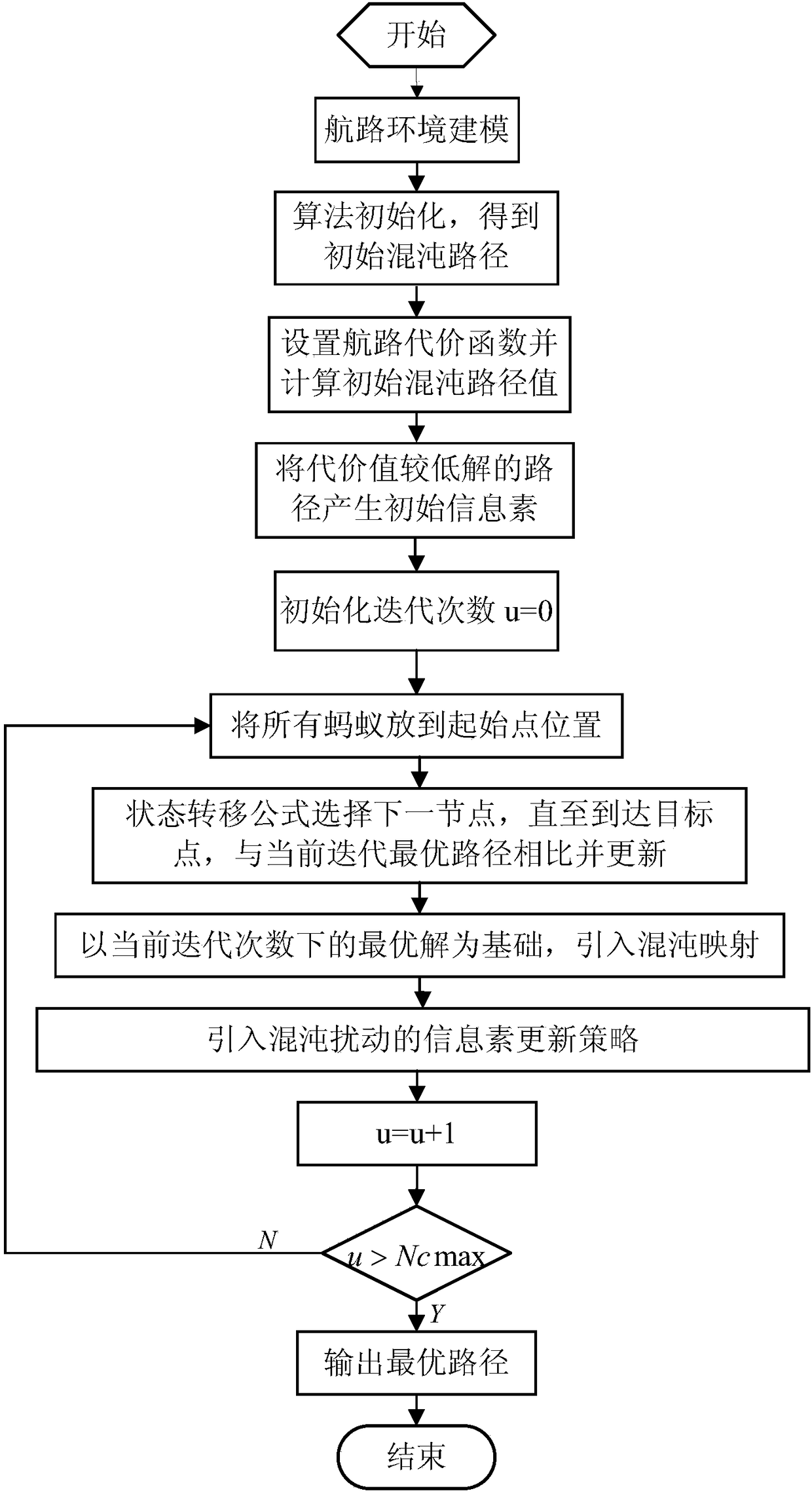
[0057] Such as figure 1 As shown, a UAV route planning method based on the improved chaotic ant colony algorithm includes the following steps:
[0058] Step S1, converting the optimal solution obtained by the chaos optimization algorithm into the initial value of pheromone of the ant colony algorithm;
[0059] In step S2, the route optimization is carried out through the ant colony algorithm, and after the optimization is completed, the chaotic mapping is performed on the qualified routes, and finally the optimal route is obtained.
[0060] In step S1, the optimal solution obtained by the chaos optimization algorithm is converted into the initial value of the pheromone of the ant colony algori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More