

Strip-shaped robot path planning method based on self-learning ant colony algorithm
A technology of path planning and ant colony algorithm, which is applied in the direction of instruments, calculations, navigation calculation tools, etc., can solve problems such as algorithm efficiency and stability need to be improved, grid density is low, and the number of feasible cells is reduced
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, but it should not be construed as a limitation on the technical solution. In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
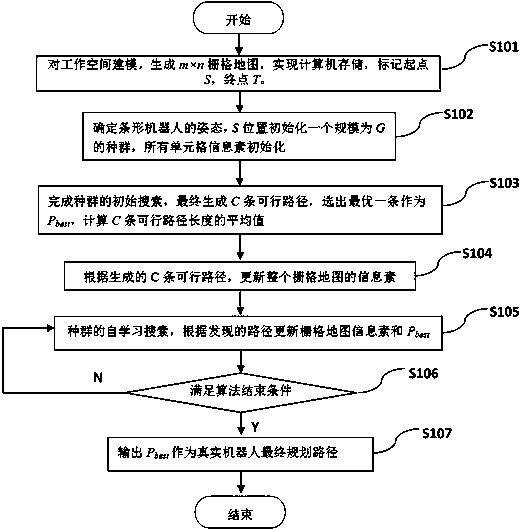
[0048] figure 1 The overall flow of the robot path planning method of the present invention is given, please refer to figure 1 , the following is a detailed description of each step in the method.
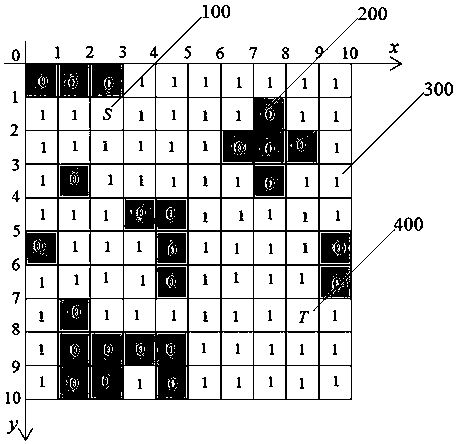
[0049] Step S101: Model the workspace, generate an m×n grid map, and implement computer storage; the cells in the grid map are marked as B θ (x ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More