

Method and system for intelligent planning path of multi-working condition wall climbing robot
A wall-climbing robot and path planning technology, applied to instruments, road network navigators, measuring devices, etc., can solve problems such as easy to fall into local optimum, slow convergence speed, etc., and achieve the effect of improving convergence speed and optimization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific implementation manners of the present invention will be further described below in conjunction with the accompanying drawings and technical solutions.
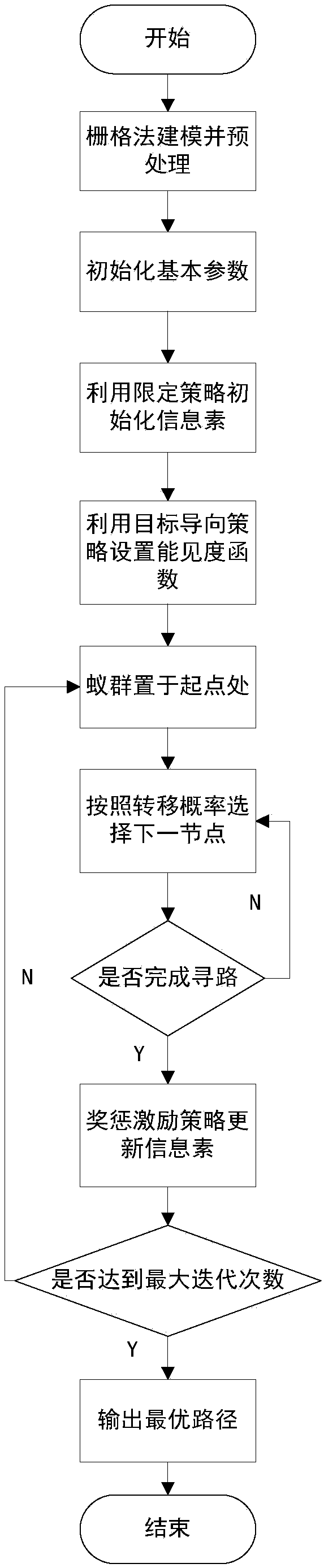
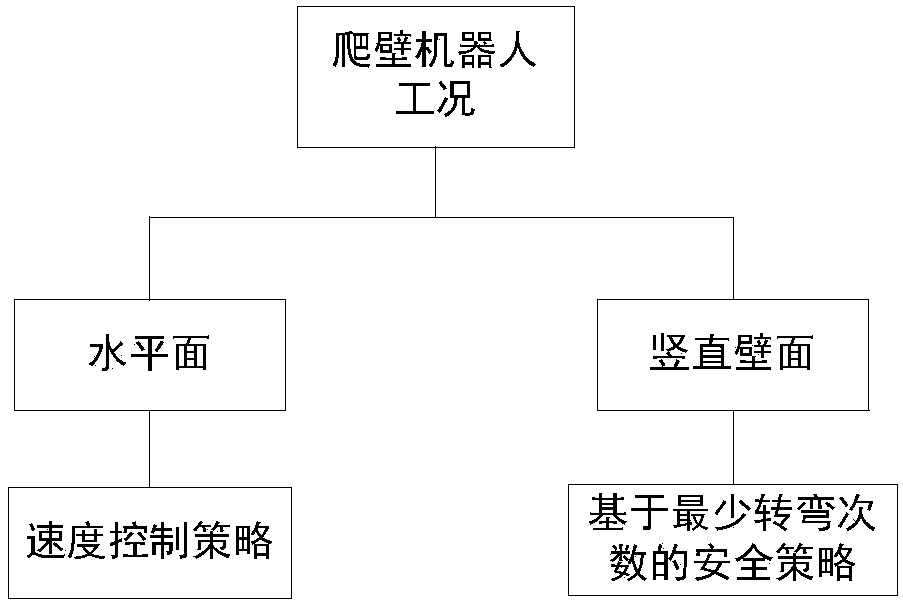
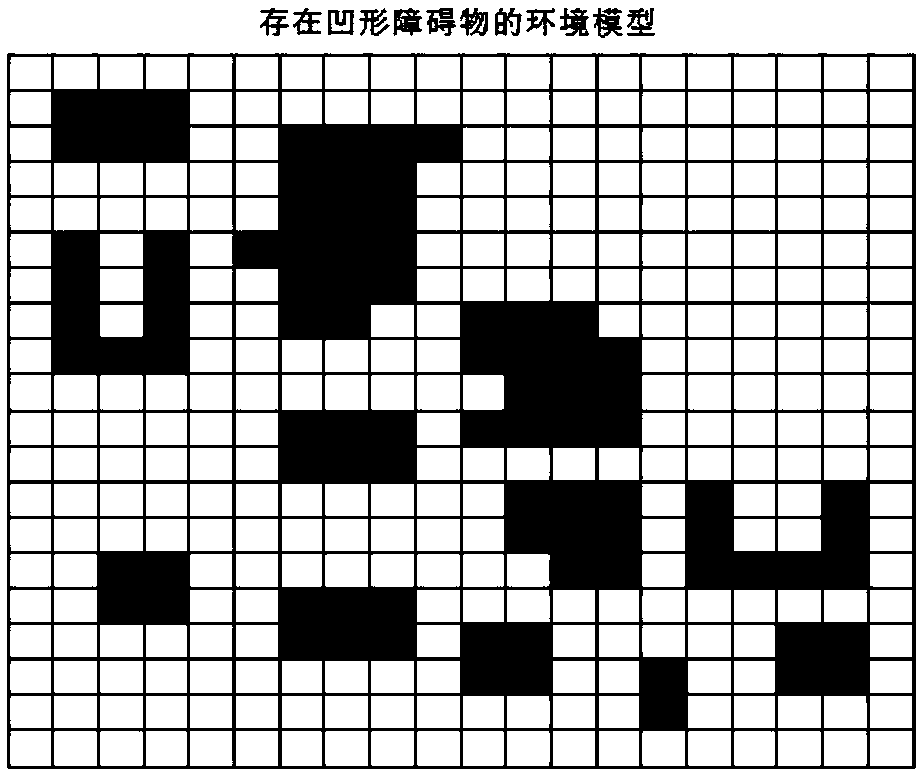
[0042] Fig. 1(a) shows the flow of the path planning method of the present invention, and Fig. 1(b) shows a schematic diagram of the environment modeling of the present invention. As shown in Figure 1, an intelligent path planning method for a wall-climbing robot that is oriented to multiple working conditions, first performs environment modeling and initialization, and then performs path search. If it is a horizontal surface, add a speed control strategy; if it is a vertical wall, add Based on the security policy of the minimum number of turns, after each round of iteration, the pheromone is updated to obtain the optimal path. The specific steps of the path planning of the wall-climbing robot in the two working environments of the horizontal plane and the vertical wall are described in detail below.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More