

Control method for compartment intelligent service robot travelling based on neural network
A technology of intelligent service and neural network, which is applied in the field of control of intelligent service robots in the car, can solve the problems of long operation cycle, high delay, slow network convergence speed, etc., and achieve the effect of short operation cycle, high precision and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The present invention will be further described in detail below with reference to the accompanying drawings.
[0045] reference figure 1 with figure 2 , A method for controlling the travel of intelligent service robots based on neural network, divided into training phase and learning phase, including the following steps:
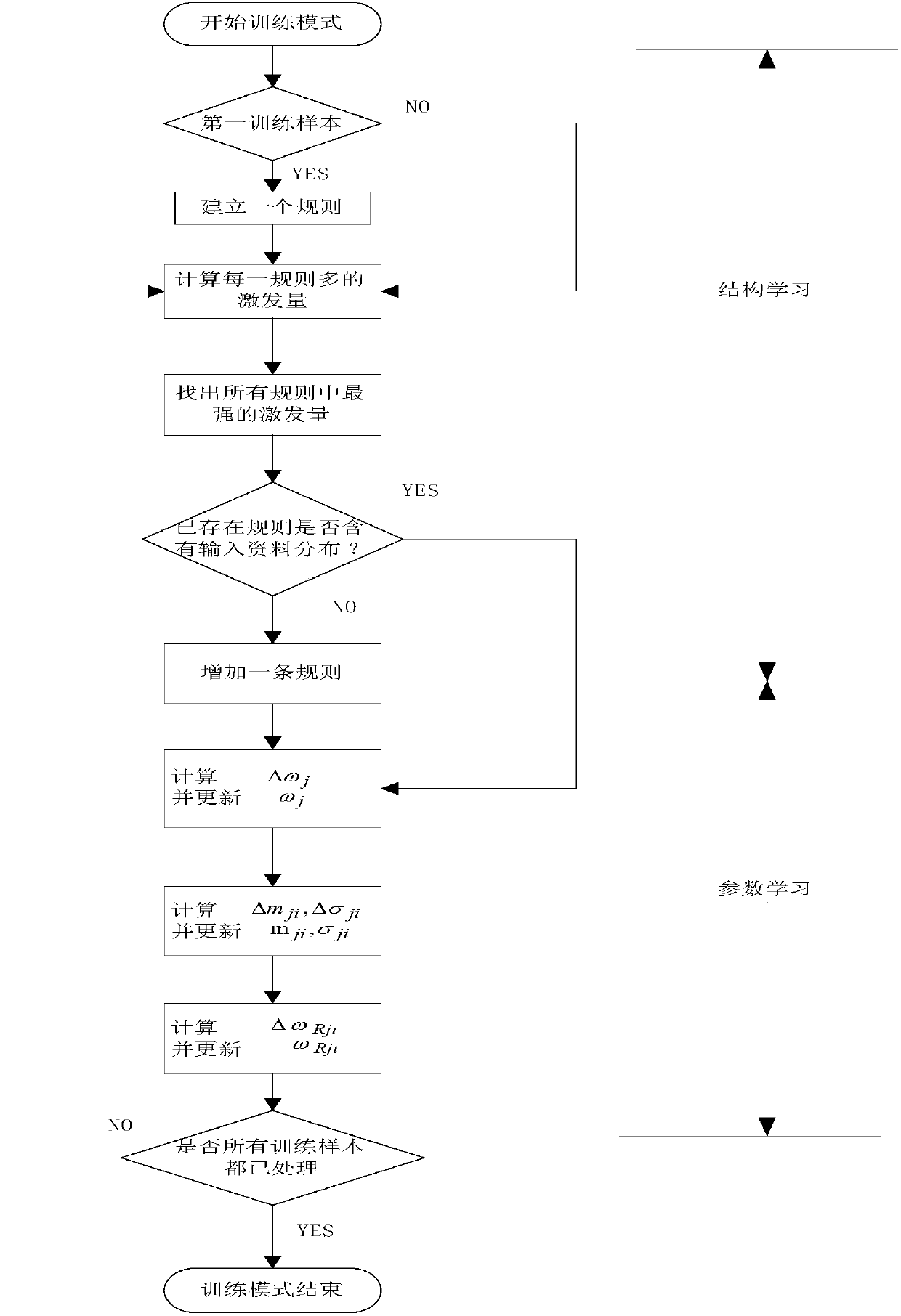
[0046] 1) Training stage; the specific steps are as follows:
[0047] 1-1) Positioning base station sensors are set in the carriage, cameras and infrared detectors are set in the robot body, and the position parameters of the robot body are collected as input variables;
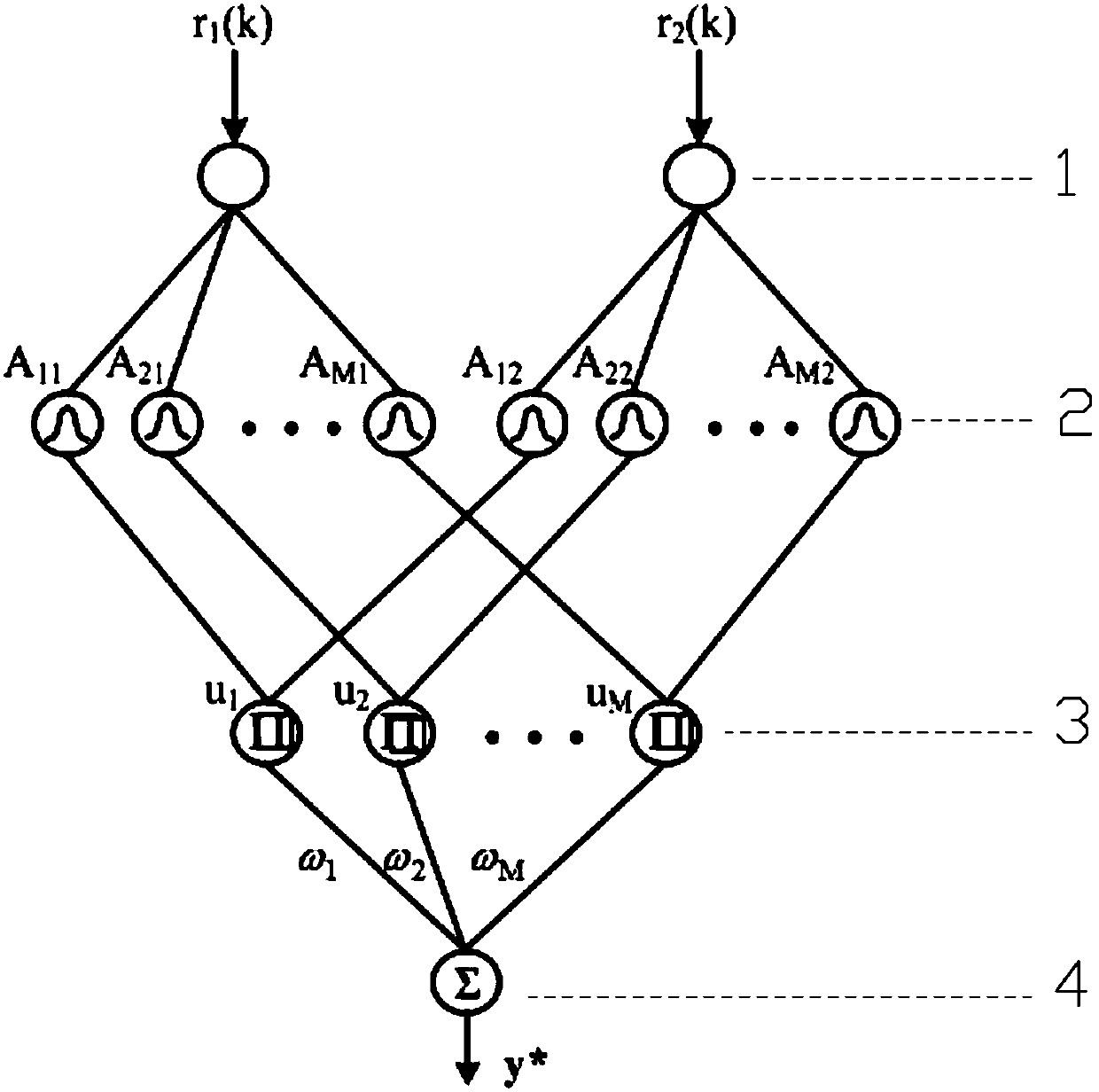
[0048] 1-2) Identify input variables, and establish SCFNN model architecture in the form of at least two input nodes and one output node;
[0049] 1-3) The SCFNN model includes four layers of operations. After the input node passes through the first layer 1, it enters the second layer 2 attribution function node and the third layer 3 product operation node, and gradually adjusts each of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More