

A Cooperative Navigation Method for Multiple Underwater Unmanned Vehicles in Polar Regions Considering Underwater Acoustic Communication Delay
A technology of unmanned aerial vehicles and cooperative navigation, which is applied in the field of cooperative navigation of multiple underwater unmanned aerial vehicles, and can solve problems such as the influence of rapid convergence of meridians
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0039] Combined graph
[0040] The main purpose of the present invention is to solve the problem that traditional multi-underwater unmanned vehicles cannot be applied in polar regions, and to design a method for cooperative navigation of multi-underwater unmanned vehicles in polar regions. At the same time, the underwater acoustic communication delay is considered, the adaptive Kalman filter algorithm is improved, and the filter fusion is used to obtain accurate navigation results for multiple underwater unmanned vehicles.
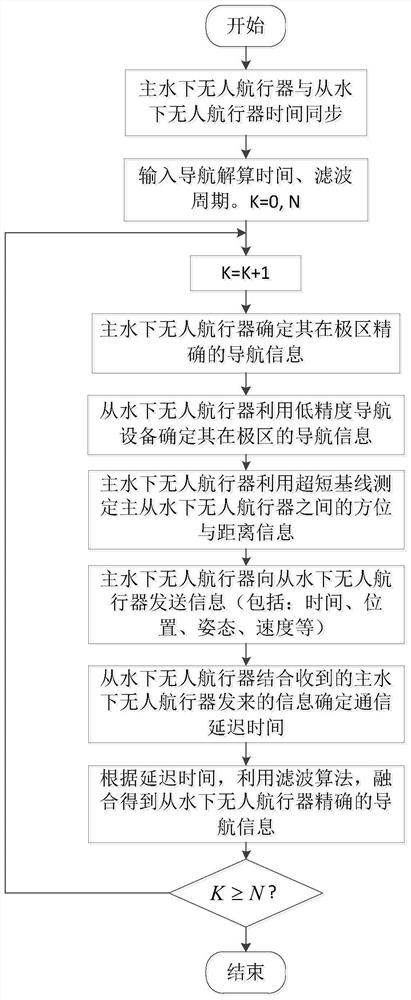
[0041] In order to achieve the above object, the technical solution of the present invention mainly includes the following steps:
[0042] Step 1: The master UAV performs precise time synchronization with the slave UUV.
[0043] Step 2: Input the cooperative navigation time t and the filtering period T of the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More