

Robot movement locus obtaining system and method based on neural network
A neural network and motion trajectory technology, applied in the direction of instruments, manipulators, artificial life, etc., can solve problems such as inconsistent efficiency, operational errors, and reduce industrial production efficiency, and achieve the effect of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
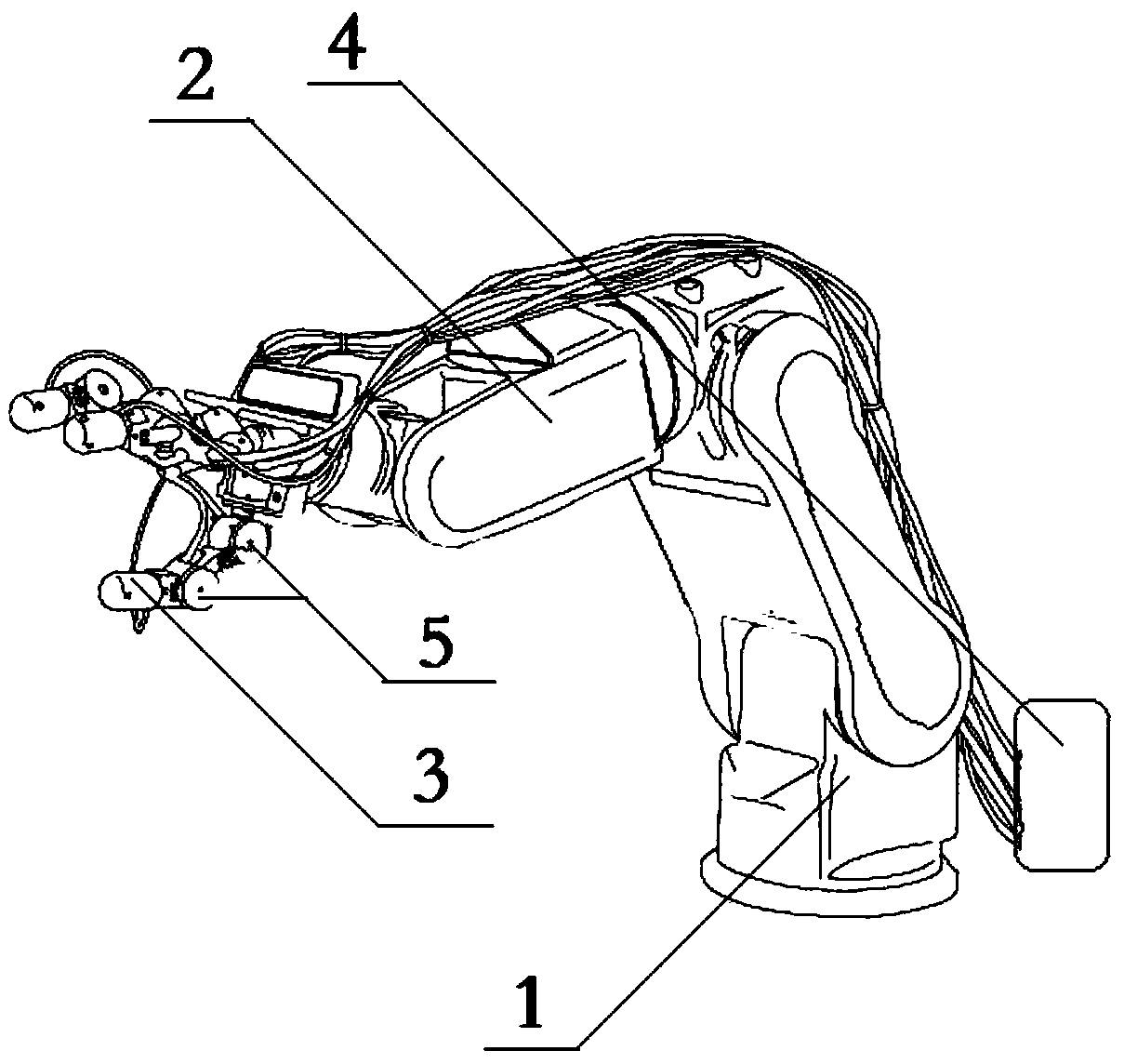
[0040] figure 1 It is a schematic diagram of a neural network-based robot motion trajectory acquisition system of the present invention. The present invention proposes a neural network-based robot action prediction system, including several robots and an algorithm controller 4, characterized in that the robot is provided with a driving motor 1, a mechanical arm 2, a robot finger 3, a camera 5, and a robot finger 3 It is arranged on the mechanical arm 2, the camera 5 is arranged on the side of the robot finger 3, the output end of the driving motor 1 is connected with the input end of the mechanical arm 2 and the input end of the robot finger 3 respectively, and the input end of the algorithm co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More