

Robot auxiliary operation system and robot auxiliary operation method
A robot-assisted and operating system technology, applied in the direction of manipulators, conveyor objects, program-controlled manipulators, etc., can solve the problem that robots are difficult to perform flexible tasks, and achieve a good synergistic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
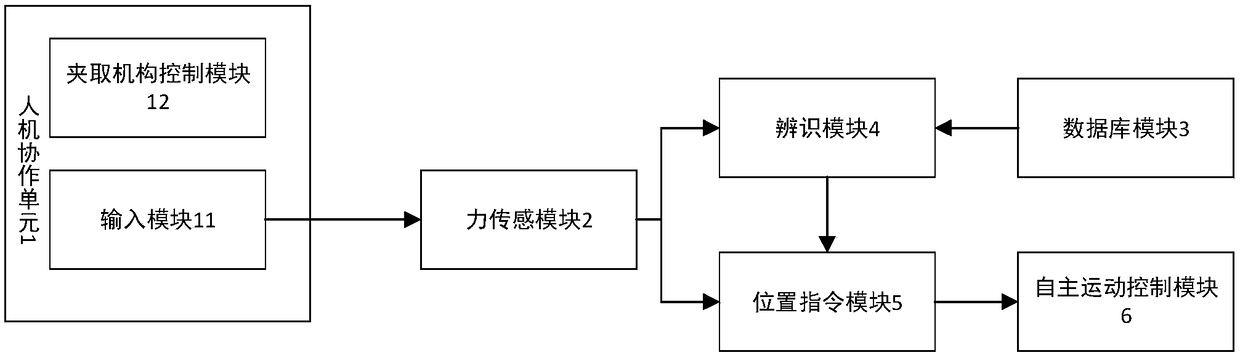
[0027] Such as figure 1 As shown, this embodiment relates to a robot-assisted operation system, which is used to control the robot to assist humans to complete operations such as handling, assembly, and positioning, including:
[0028] The man-machine cooperative operation unit 1 is used to input the manipulation force to the flange end of the robot connected with the clamping mechanism;
[0029] A force sensing module 2, which is arranged at the end of the flange of the robot, is used to obtain the force situation at the end of the flange of the robot;
[0030] The database module 3 is used to store standard mechanical parameters of all workpieces, including standard quality parameters and standard center-of-mass parameters of workpieces;
[0031] The identification module 4 is used to identify the mechanical parameters of the clamped workpiece and match them with the stored standard mechanical parameters of the workpiece;
[0032] The position command module 5 is used for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More