Integrated controlling and remote monitoring platform for connected vehicle
A vehicle control and remote monitoring technology, applied in program control, general control system, electrical testing/monitoring, etc., can solve the problems such as the inability of the vehicle terminal to interact with the vehicle controller, vehicle performance evaluation, and poor operation timeliness, etc. The effect of reducing data processors, good operation timeliness, and increasing monitoring variables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
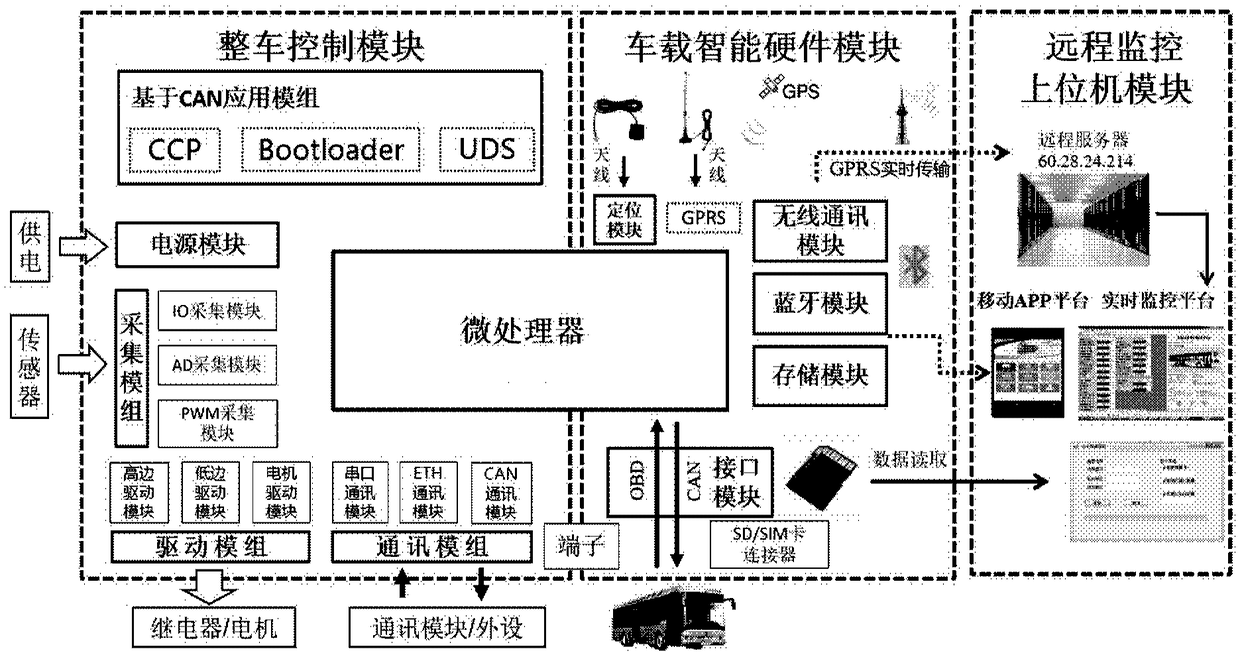
[0027] The present disclosure provides a vehicle control and remote monitoring platform oriented to intelligent networking. The vehicle control and remote monitoring platform includes a vehicle control module, a remote monitoring host computer module and a vehicle intelligent hardware module. The vehicle control module is used for the overall Manage the operation of the system, collect signals sent by peripheral sensors in real time and / or exchange information with external devices, and control the vehicle through the vehicle control module; the vehicle-mounted intelligent hardware module is used in the vehicle control module and remote monitoring host computer Information exchange between modules; the on-board intelligent hardware module and the vehicle control module share the microcontroller; the remote monitoring host computer module is used to monitor, locate and / or data analyze the vehicle according to the interactive information of the on-board intelligent hardware module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com