

Autonomous navigation system and method of unmanned aerial vehicle based on electric field equipotential surface of extra-high voltage line region
An autonomous navigation system and ultra-high voltage line technology, applied in the field of UAV autonomous navigation system, can solve problems such as UAV out of control, GPS weak signal interference, interference with UAV flight control measurement module and other circuit components, etc. Achieve the effects of enhancing stability and accuracy, solving out-of-control problems, and solving inspection operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
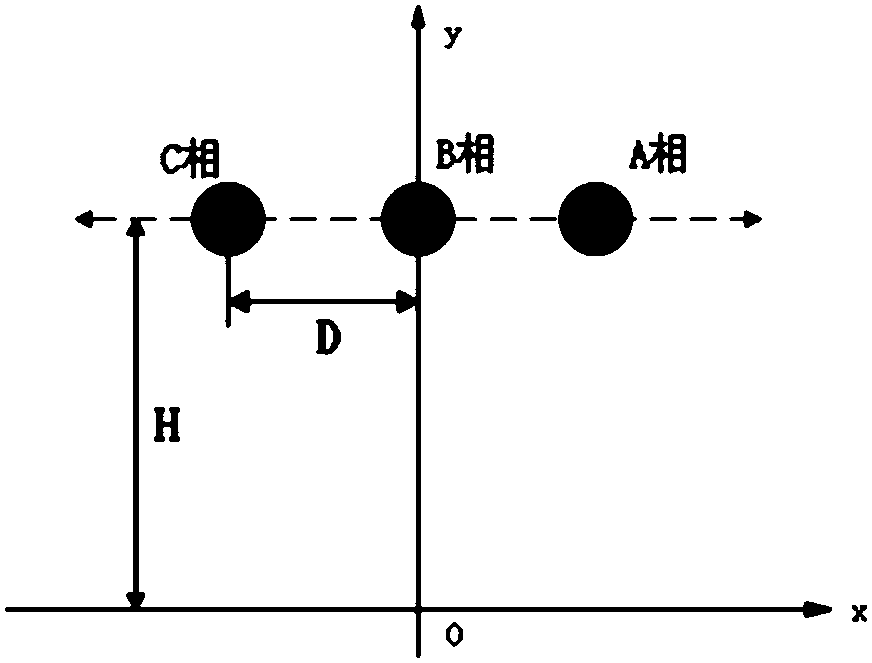
[0045] This embodiment has carried out the field model experiment of the ultra-high voltage transmission line, the ultra-high voltage transmission line in the set model is 500KV, and the approximate relationship between the distance (D) between the transmission lines and the distance (H) from the ground of the transmission line is as follows figure 1 As shown, phase A, phase B, and phase C represent the three transmission lines on the tower respectively. The radius of the four split wires is 0.3m, and the radius of the secondary split wire is 0.0418m. Taking the ground as the zero potential and considering the ground as a good conductor, an analog charge can be set on the mirror position of the wire corresponding to the ground, which equivalently replaces the influence of the induced charge on the performance of the ground.
[0046] Set matching points on the surface of each phase conductor, and solve the following matrix to obtain the simulated charge τ n(m) for:
[0047] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More