

Fine stablization disturbance decoupling method for composite axis photoelectric tracking system of motion platform
A technology of optoelectronic tracking system and motion platform, which is applied in the direction of control using feedback, etc., can solve the problems of narrow disturbance suppression frequency band, phase advance of low frequency part of disturbance signal, loss of low frequency disturbance information, etc., to achieve simple algorithm and easy engineering implementation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described below in conjunction with the accompanying drawings and specific embodiments, and those skilled in the art can understand the functions and advantages of the present invention according to the content disclosed in this specification.
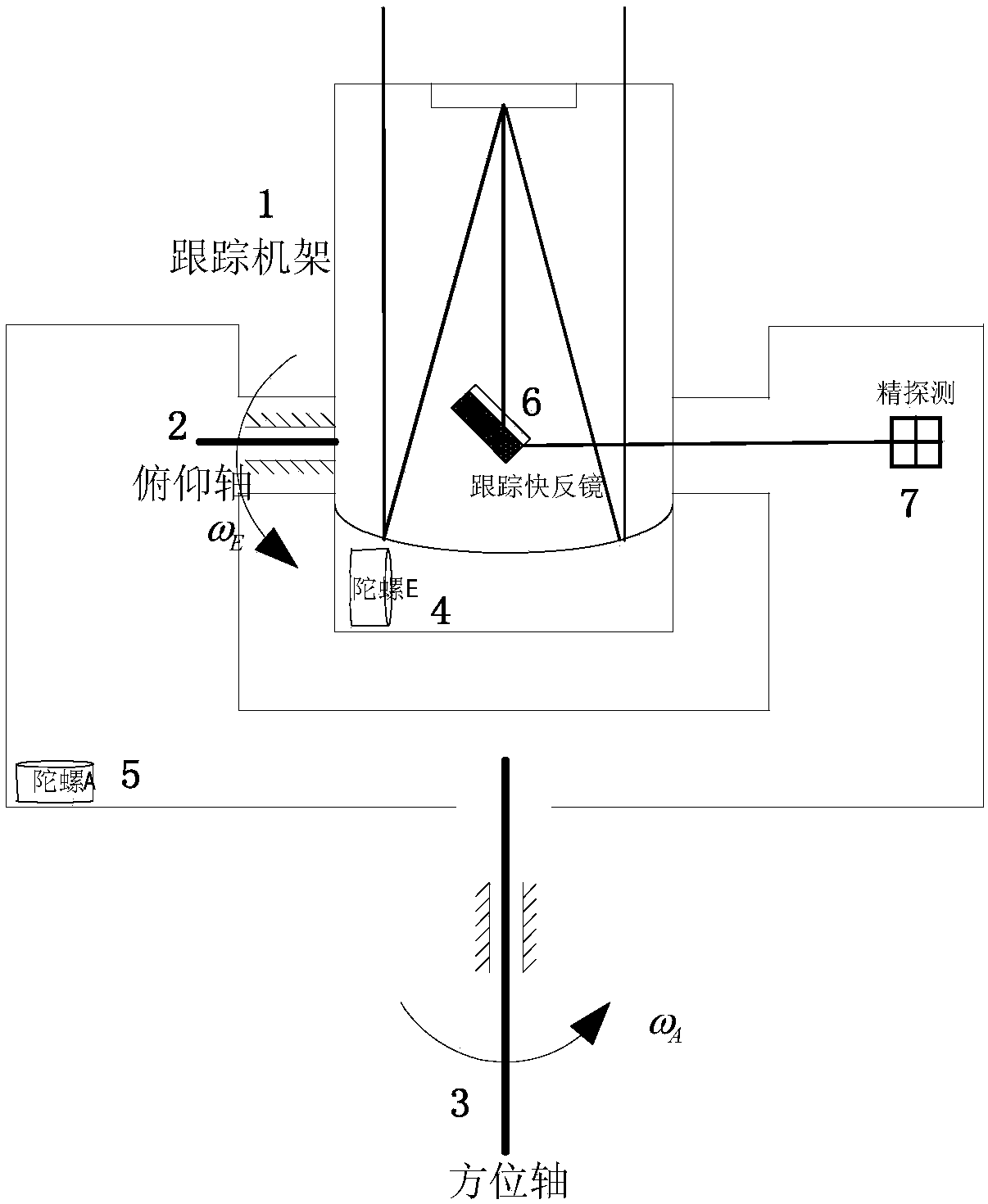
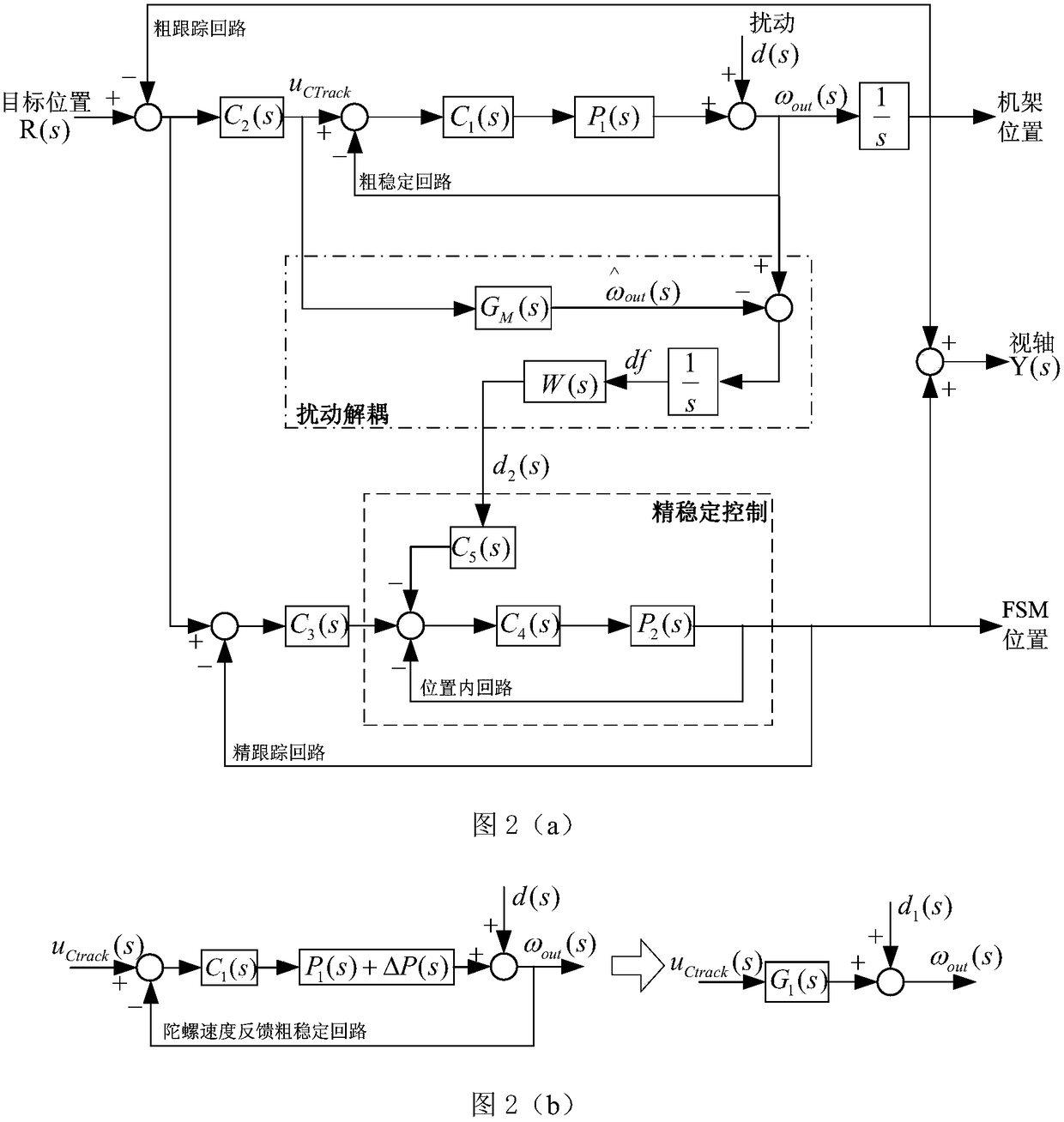
[0017] (1) Angular rate gyros A and E are respectively installed on the azimuth axis and the pitch axis of the tracking frame, and the angular velocity of the azimuth axis and the pitch axis of the sensitive frame is sensitive. Let the rack speed characteristic transfer function be: Design rack speed loop controller C 1 (s) are:
[0018] (2) Establish the frame speed loop closed-loop model G M (s), design G M (s) are: Simultaneously input the target angular velocity to the frame velocity loop and G M (s), the outputs of the two are ω out (s) and is the residual disturbance after active coarse stability loop suppression.
[0019] (3) Design a rough tracking controller C 2 (s), fine tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More