

Method and system for planning sea path of unmanned ship based on RRT (rapidly-exploring random tree) algorithm
A technology for path planning and unmanned ships, applied in the direction of navigation calculation tools, measuring devices, instruments, etc., can solve the complex sea environment where obstacles cannot be solved, only consider one starting point and one end point, and the time planned by genetic algorithm Long-term problems, to achieve simple and effective thinking, maintain high efficiency, and achieve simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
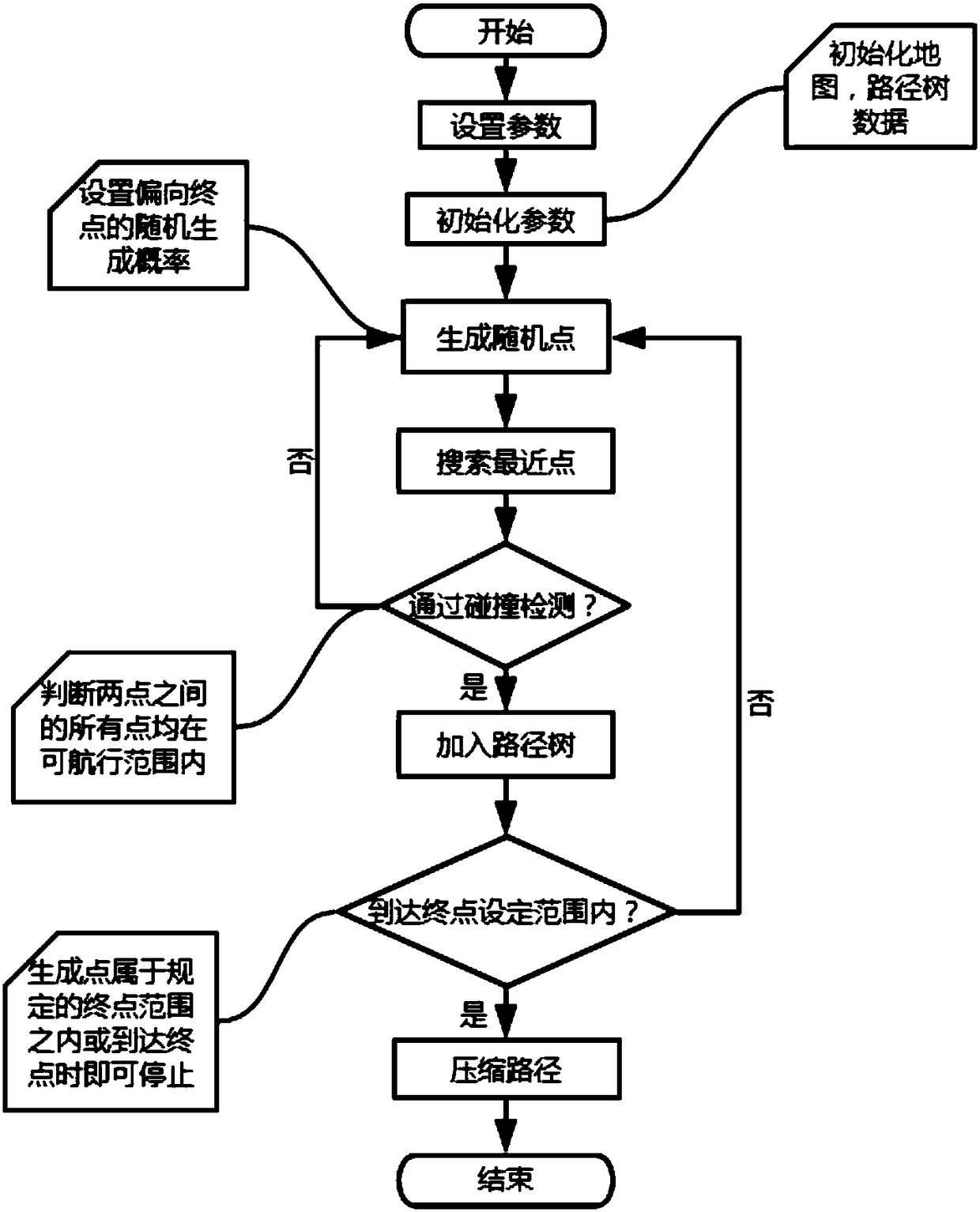
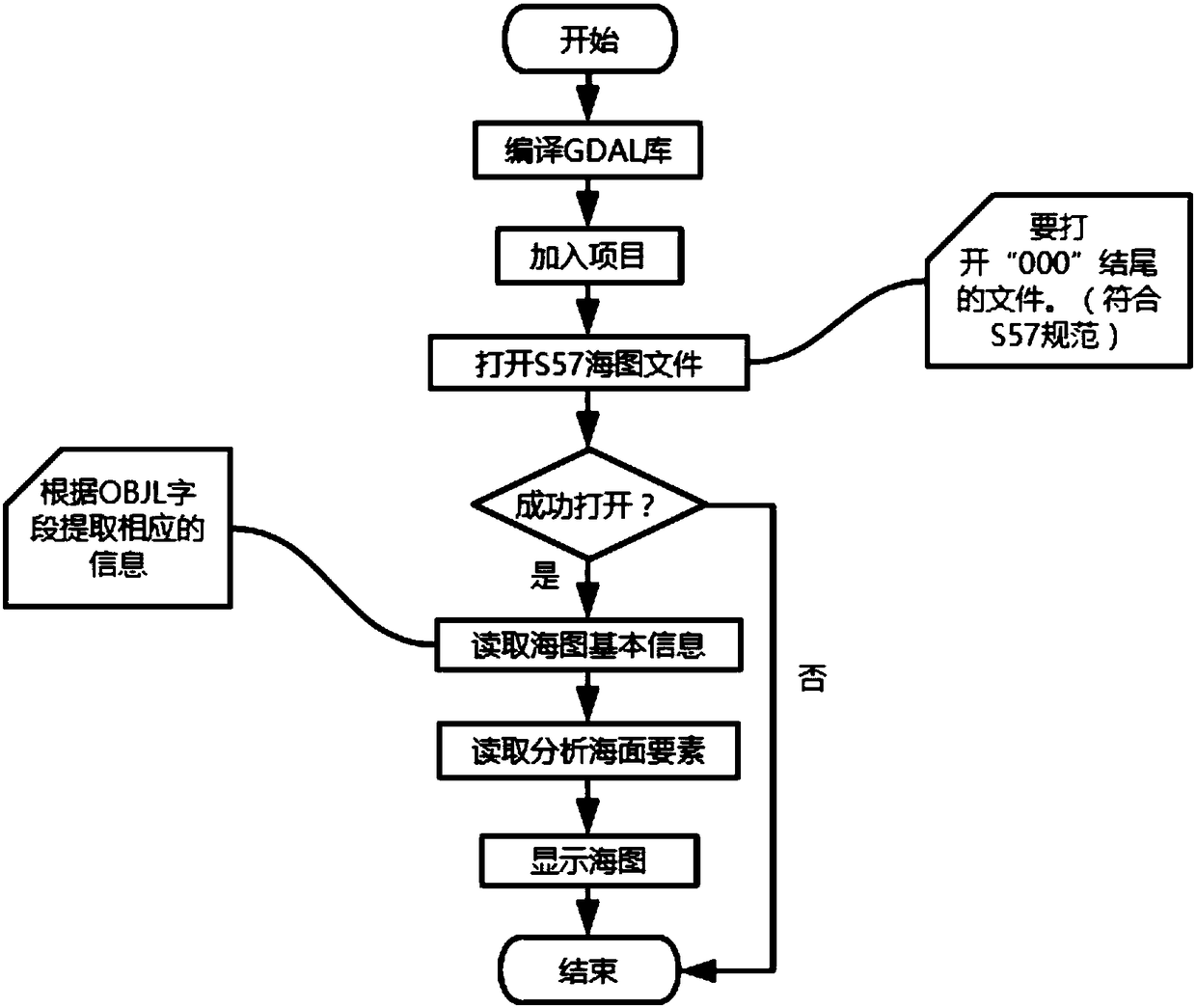
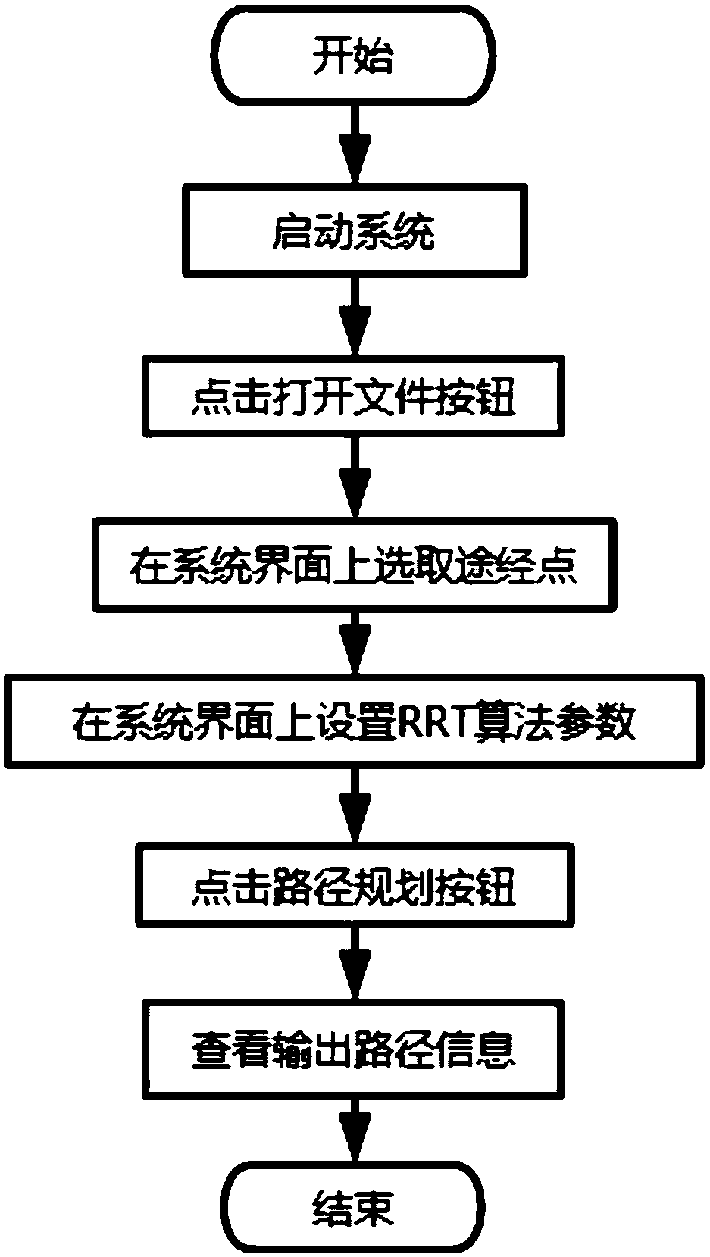
[0035] Such as Figure 1-Figure 3 As shown, a sea path planning method for unmanned ships based on the RRT algorithm includes the following steps:
[0036] The first step is to obtain the original data of the chart. In this embodiment, the GDAL library is used to analyze the S57 chart. The S57 standard encapsulation format is the ISO / IEC 8211 international standard, and the ISO / IEC 8211 standard is composed of logical records as the basic unit. The first record of ISO8211 is called data descriptive record (DDR), and all subsequent logical records (logical record, LR) are called "data record" (data record, DR), which contains the actual data to be exchanged by the file. The overall information of the file is defined in DDR, including file name, field name, field type, field format and length, relationship between fields, and subfield names. GDAL is an open source library written in C++, which can extract the information of a specific layer in the S57 file. All elements of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More