

Anti-interference iterative learning control method for space manipulator system for capturing non-cooperative targets
An iterative learning control and space manipulator technology, which can be used in general control systems, adaptive control, control/regulation systems, etc., and can solve the problem of low control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with the accompanying drawings and examples.
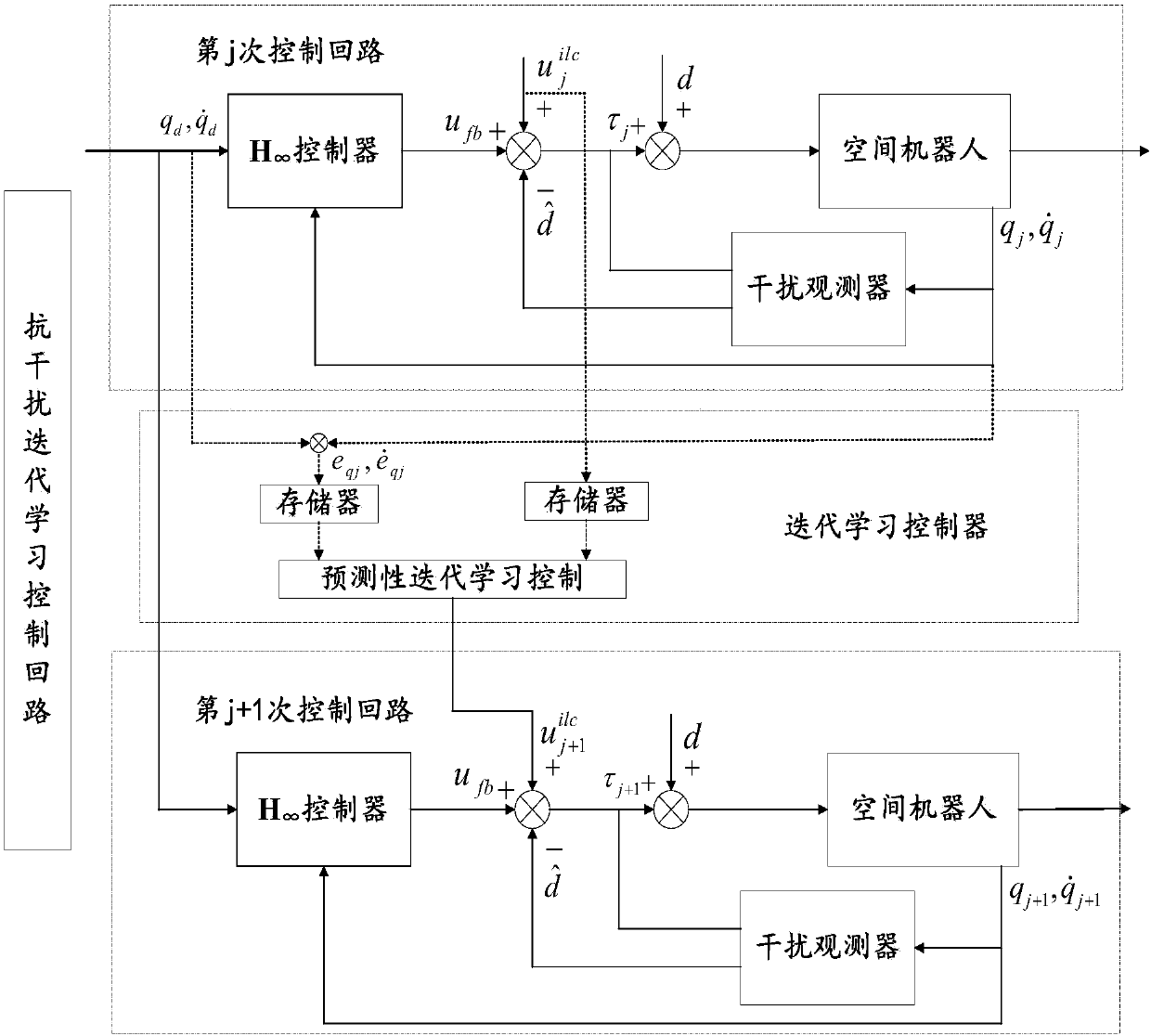
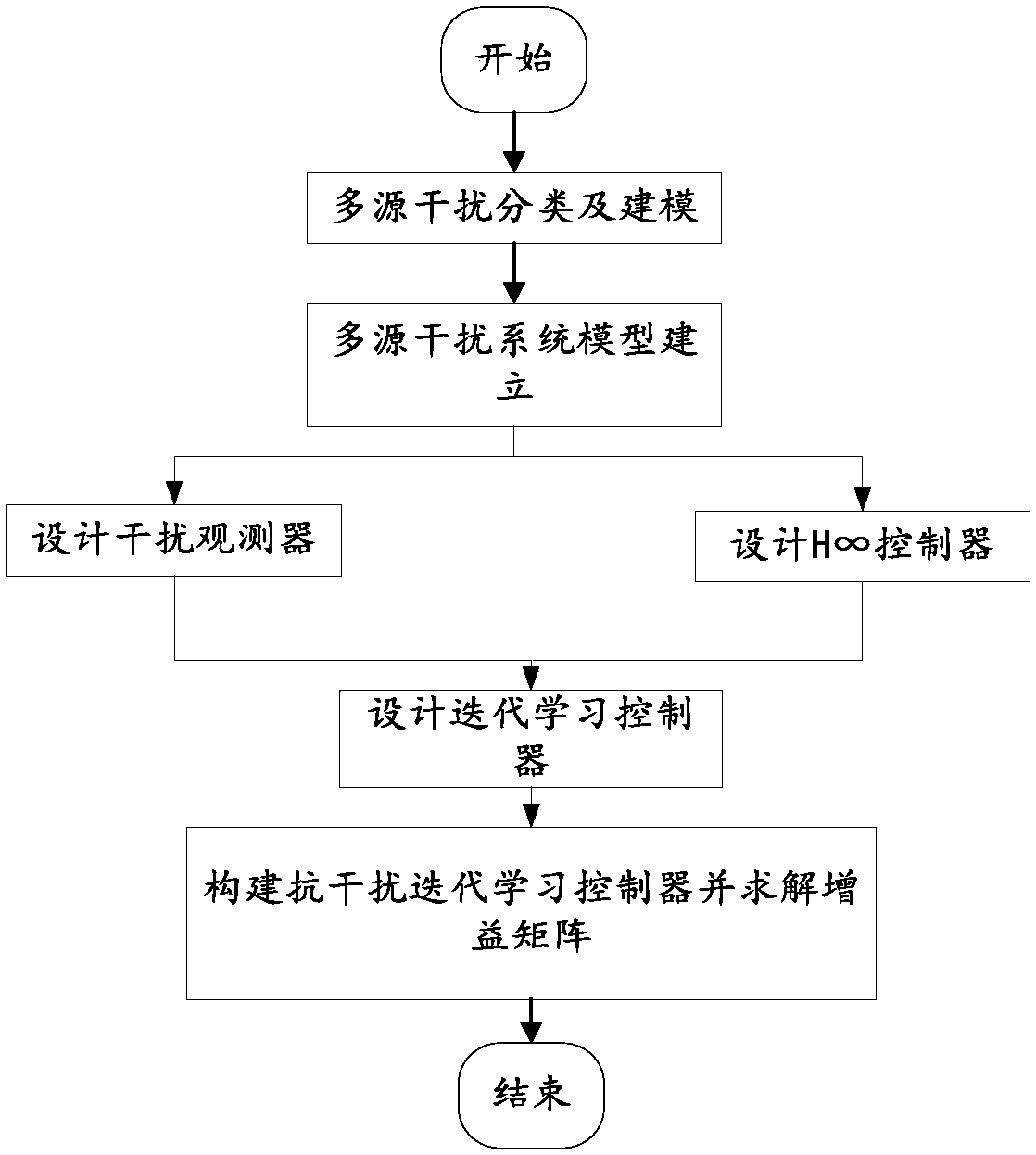
[0044] Such as figure 1 As shown, the present invention is a space manipulator system anti-interference iterative learning control method for catching non-cooperative targets. The space manipulator system with dynamic multi-source interference; firstly, analyze and classify the multi-source interference received by the space manipulator system in the case of capturing non-cooperative targets on orbit, and establish a system coupling dynamic model including multi-source interference; Secondly, a disturbance observer is designed to estimate and compensate the external disturbance moment and the disturbance moment due to target non-cooperation, using the robust H ∞ The control suppresses the random noise of the internal sensors of the norm-bounded space manipulator system and the estimation error of the disturbance observer, and uses iterative lear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More