

Robot joint self-adaption control method of variable-rigidity serial connection elastic driver
A robot joint and adaptive control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of increasing difficulty in control algorithm design, complex dynamic modeling and control, and immature control technology. Achieve the effect of improving energy utilization efficiency, solving the problem of dynamic parameter uncertainty, and improving control accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
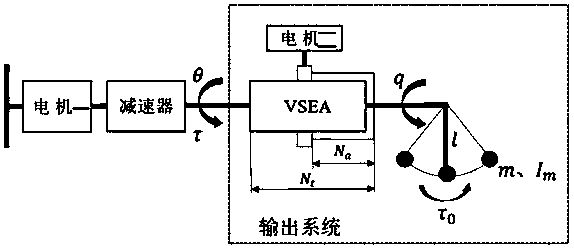
[0070] See attached Figure 1-5 , a robot joint adaptive control method based on VSEA (Variable Stiffness Linked Elastic Actuator), comprising the following steps:
[0071] Step 1: Modeling the robot joint based on VSEA, obtaining the dynamic model of the robot joint, and determining the model parameters.
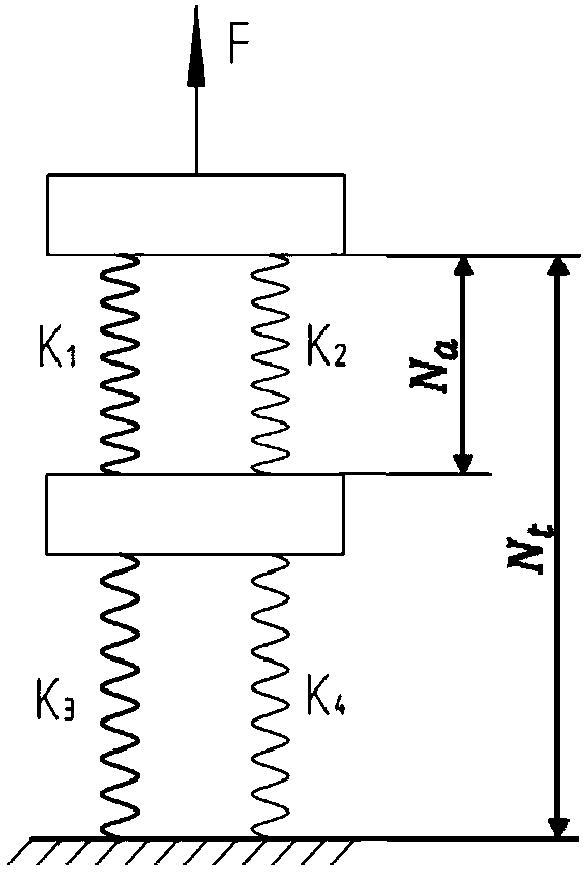
[0072] Step 2: Mathematically modeling the VSEA variable stiffness system to obtain a mathematical model of the VSEA system stiffness variation.
[0073] Step 3: Plan the trajectory of the robot joints to obtain the working frequency of the robot, and adjust the system stiffness based on the natural dynamics according to the mathematical model of the VSEA system stiffness change, so that the system working frequency is consistent with the system anti-resonance frequency.
[0074] Step 4. According to the dynamic model of the robot joint, the Lyapunov equation is established, the adaptive controller and the adaptive rate are derived, and its stability is proved.
[0075] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More