

A self-adaptive special-shaped pipe photoelectric measurement and processing integrated robot
A photoelectric measurement and self-adaptive technology, applied in the direction of measuring devices, instruments, manipulators, etc., can solve the problems that special-shaped pipelines cannot achieve self-adaptation, the overall structure and driving principle of pipeline robots are complicated, and achieve high passability and high reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
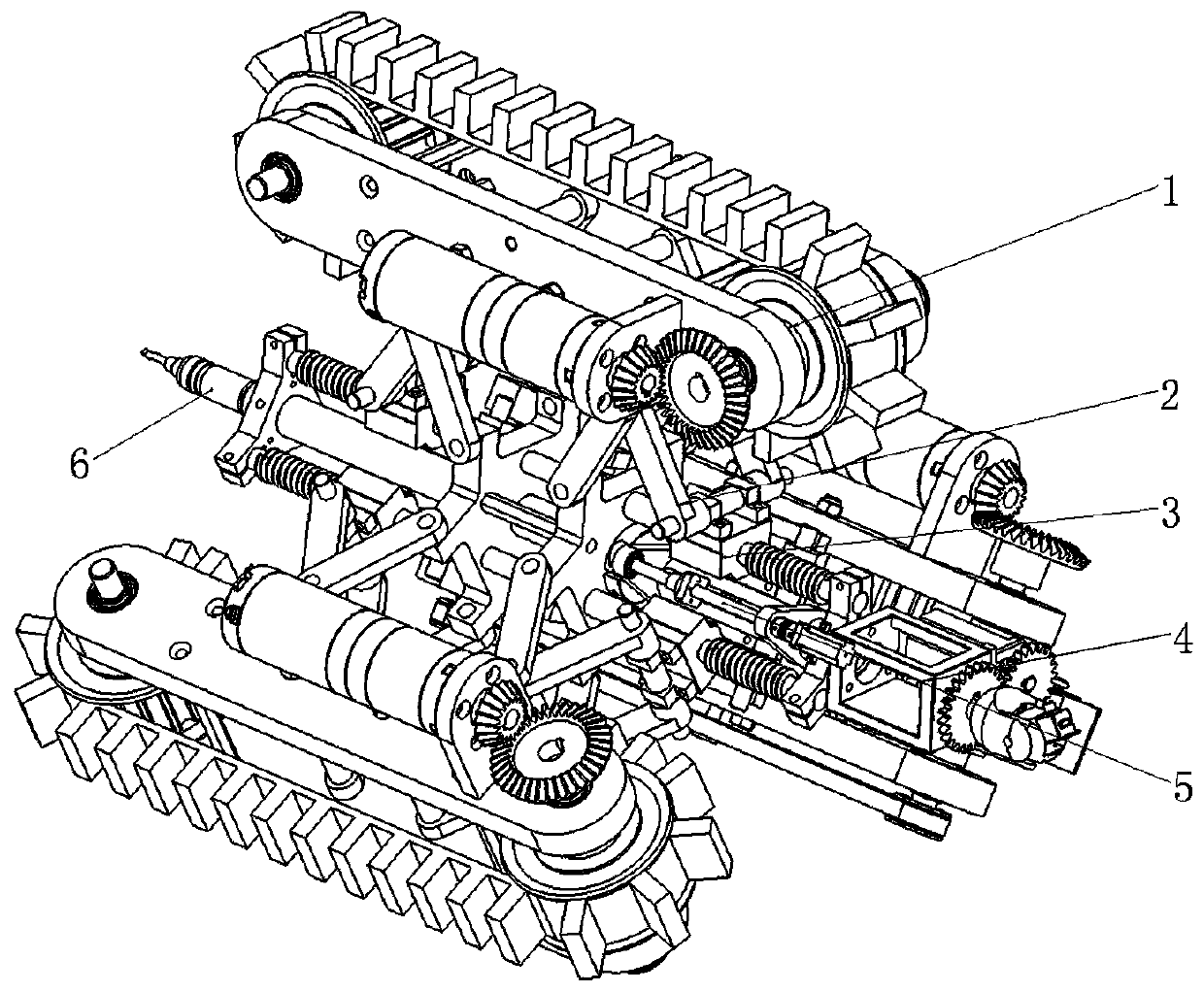
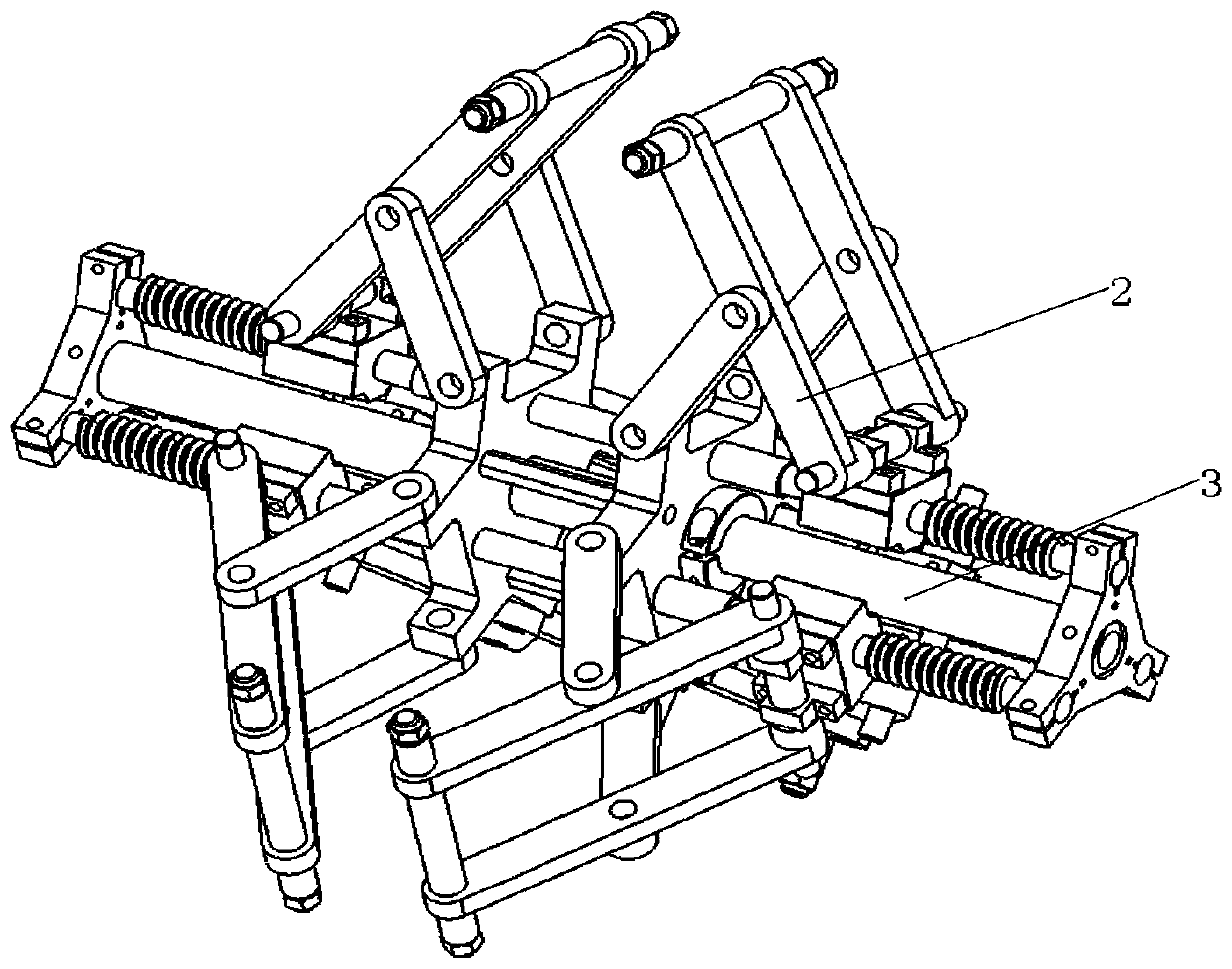
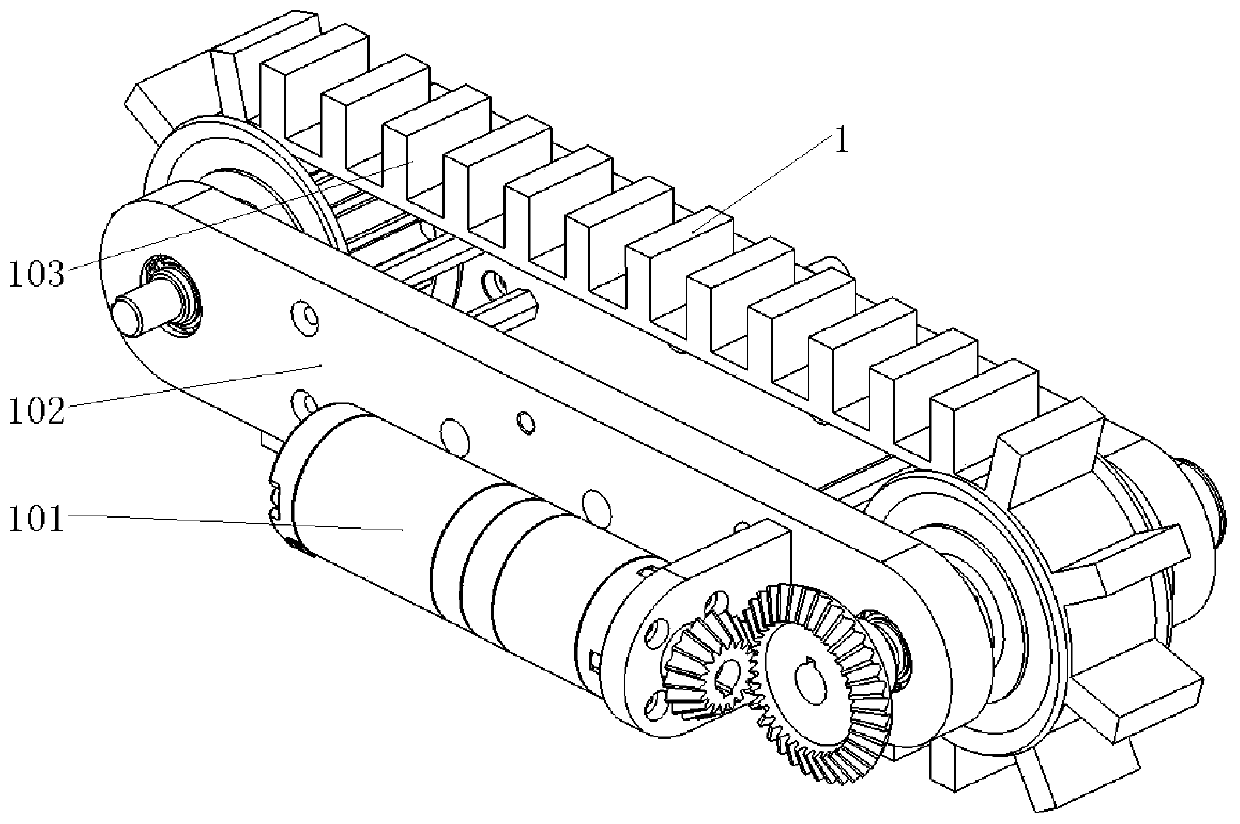
[0043] Such as Figure 1-15 As shown, the present invention provides an adaptive special-shaped pipeline photoelectric measurement and processing integrated robot, which specifically includes a self-propelled crawler assembly 1, an adaptive assembly 2, a guide rod support assembly 3, a photoelectric measurement / processing assembly 4, and a dynamic focusing assembly 5 and fiber adapter 6. The self-propelled crawler assembly 1 and the adaptive assembly 2 are provided with three groups, and each group of self-propelled crawler assembly 1 is arranged on the guide bar support assembly 3 through the corresponding adaptive assembly 2, and two adjacent groups of self-propelled crawler assemblies 1 The angle between them is 120 degrees. Each group of adaptive components 2 includes two opposite adaptive connecting rods, the adaptive connectin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More